Transformer 03
GNN 基础1
生成模型基础4
Transformer 基础3
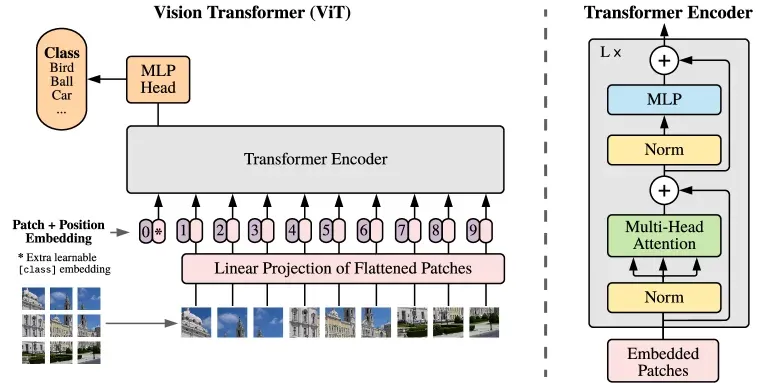
ViT(Vision Transformer)直接把图像视为一串序列,把 Transformer 结构引入了视觉任务。
这是 Transformer 走向跨模态大一统的标志性起点。
序列转换
在 CNN 中,图像天然是一张二维网格。卷积核在这张网格上滑动,局部感受野叠加,模型从边缘纹理走向高级语义。
Transformer 无法直接处理二维网格,它的标准输入格式是一维的 Token 序列:
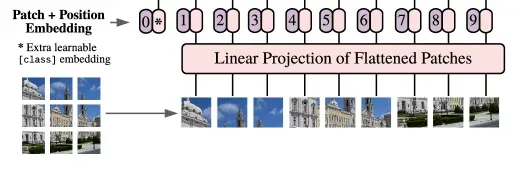
ViT 解决输入格式差异的方法是 Patchify(图像分块)。
假设输入图像的维度是 (高、宽、通道数),设定的 Patch 边长是 。ViT 会将整张图像切分为互不重叠的图块。
切分后的 Patch 数量(即序列长度)为:
每个图块本身包含 个像素值。将其展平为一个一维向量后,需要通过一个线性投影层,将其映射到 Transformer 统一的隐藏层维度 :
至此,一张图像完成了从二维像素网格到长度为 、维度为 的 Token 序列的转换。
块级词元
如果不做 Patchify,而是把图像的每个像素直接视为一个 Token,计算代价是无法承受的。
以一张 的 RGB 图像为例,逐像素输入的序列长度为:
Transformer 中 Self-Attention 的时间与空间复杂度均为 。长度超过 5 万的序列会导致显存直接溢出。
采用论文中经典的 尺寸(即 ViT-B/16),序列长度缩减为:
196 的序列长度对 Transformer 而言处于极高效率的计算区间内。
在代码实现层面,Patch Embedding 的展平与线性投影操作,完全等价于一个大步长的二维卷积:
眼不眼熟,这跟我们之前在棋盘效应分析里的等价推导异曲同工。
这里使用卷积并非为了引入 CNN 的局部先验,仅仅是工程上利用成熟算子高效实现非重叠滑动切块与维度映射。
位置编码
Self-Attention 机制具有排列不变性,它本身无法感知序列元素的先后位置。图像切分成块后,如果不提供空间信息,模型将无法区分相邻和相距甚远的图块。
ViT 为每个 Patch Token 显式注入位置编码:
公式拆解:
- :第 个图块展平后的原始向量。
- :Patch Embedding 的线性投影矩阵,维度为 。
- :经过投影后的第 个 Patch Token。
- :额外追加在序列开头的分类标记(Class Token),维度为 。
- :可学习的一维位置编码矩阵,维度为 。它与拼接后的 Token 序列直接相加。
位置编码的作用是让 Transformer 在进行全局 Attention 计算时,能够感知当前 Token 在原图像中的具体物理坐标。
分类标记
ViT 在所有 Patch Token 的最前端插入了一个特殊的分类标记(Class Token)。这种设计直接沿用了 BERT 处理文本分类任务的范式。
Class Token 初始化时仅是一个随机的可学习向量,不包含任何具体图像像素信息。经过多层 Transformer 结构的 Self-Attention 交互后,它会不断从各个位置的 Patch 中聚合全局信息。
最终的分类头只需要读取最后一层的 Class Token 输出进行判别:
公式拆解:
- :第 层(最后一层)Transformer 输出序列中,索引为 0 的向量,即更新完毕的 Class Token。
- :Layer Normalization 操作。
- :多层感知机(分类头),输出维度对应分类类别的数量。
- :最终的预测概率分布。
Class Token 是一个信息汇聚点,Patch 负责携带原始局部视觉特征,Class Token 负责收敛全图上下文并做出决策。
编码器
完成前端的 Patch 转换、位置编码和标记插入后,ViT 内部的主干网络完全照搬了标准的 Transformer Encoder 结构,未做任何视觉特化修改。
其核心前向传播过程如下:
公式拆解:
- :上一层的输出序列。
- :前置的层归一化。
- :多头自注意力机制(Multi-Head Self-Attention),负责所有图块间的全局信息交互。
- :包含非线性激活函数的多层感知机,负责单个图块特征的维度变换与特征提取。
- 两个式子末尾的加法均为残差连接(Residual Connection),用于缓解梯度消失。
NLP 处理词元片段,ViT 处理图像图块。Self-Attention 的本质是计算向量序列的相关性并完成信息聚合,它不关心底层数据模态。只要输入被标准化为统一的 Token,计算逻辑就完全一致。
归纳偏置
CNN 的统治力建立在强烈的视觉归纳偏置(Inductive Bias)之上:
- 局部性:图像中相邻的像素相关性更高。
- 平移等变性:相同的特征(如猫的耳朵)无论出现在图像哪个位置,卷积核都能通过权值共享识别它。
ViT 抛弃了这些人工设计的先验假设。Self-Attention 默认所有 Patch 之间都有连接,让模型自己从零开始去学习谁和谁有关。
这种架构设计的代价是极度的数据饥渴。在 ImageNet 这种百万级中等规模数据集上,ViT 缺乏先验的劣势会导致其泛化能力不如同级别的 CNN(如 ResNet)。
但优势在于上限极高的扩展性(Scalability)。当预训练数据量达到千万甚至亿级别(如 JFT-300M)时,Transformer 纯粹的矩阵运算和更少的假设限制,使其性能天花板远超 CNN。
范式转移
ViT 并没有宣判 CNN 在所有场景的死刑,边缘计算和数据受限任务依然是 CNN 的主场。
ViT 的核心价值在于完成了视觉底座的范式转移:从“依靠人工先验设计局部结构”转向“依靠大规模数据学习全局关系”。
它证明了:视觉任务不需要被困在卷积的框架里。只要解决“如何将信号 Token 化”的问题,Transformer 就能成为跨越 NLP、CV 乃至更多模态的通用架构。后续的视觉语言大模型(VLM)以及将扩散模型骨架替换为 Transformer 的 DiT,其底层逻辑全部建立在 ViT 铺设的这条道路上。