CNN 06
GNN 基础1
生成模型基础4
Transformer 基础3
U-Net 解决了视觉模型在空间维度上的核心矛盾:如何在提取高级语义特征的同时,精确恢复每一个像素的位置信息。
局限
在经典的 CNN 架构中,网络的核心诉求是特征提取与分类。
分类任务的输出粒度极粗,本质上是整张图像到单一标签(如 )的映射。这种任务天然契合不断下采样的网络结构,因为分类只关心“图里有什么”,不在乎特征的具体空间坐标。
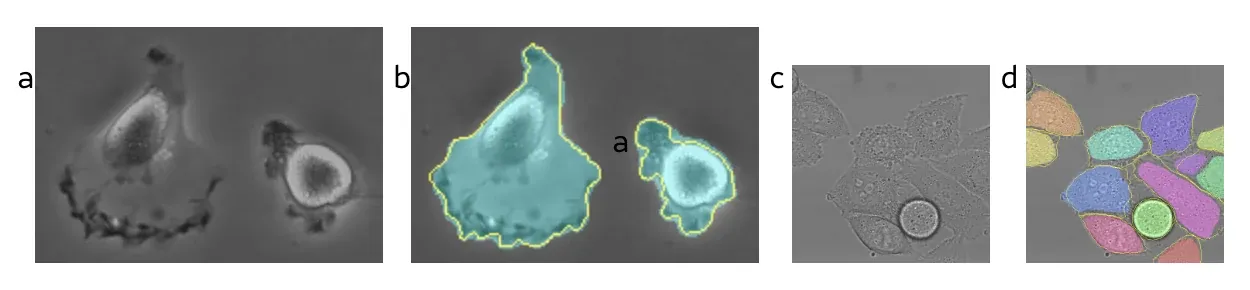
但在医学图像分割等任务中,需求是像素级预测。模型不仅要知道“图里有没有肿瘤”,还要输出一张与原图对齐的 Mask,明确每一个像素的归属。
此时的映射关系变成了:
- :图像高度。
- :图像宽度。
- :输入通道数。
- :输出通道数,即分割类别总数。
- 二分类(背景&肿瘤):。
- 多分类(背景&器官&肿瘤&血管): 等于类别数量。
分割模型由此陷入矛盾:既需要通过下采样获取足够大的感受野以理解全局,又需要保留极高的空间分辨率以还原边界。
U-Net 就此诞生。
架构
U-Net 呈 U 型拓扑形状,整体分为左右两个对称的部分。
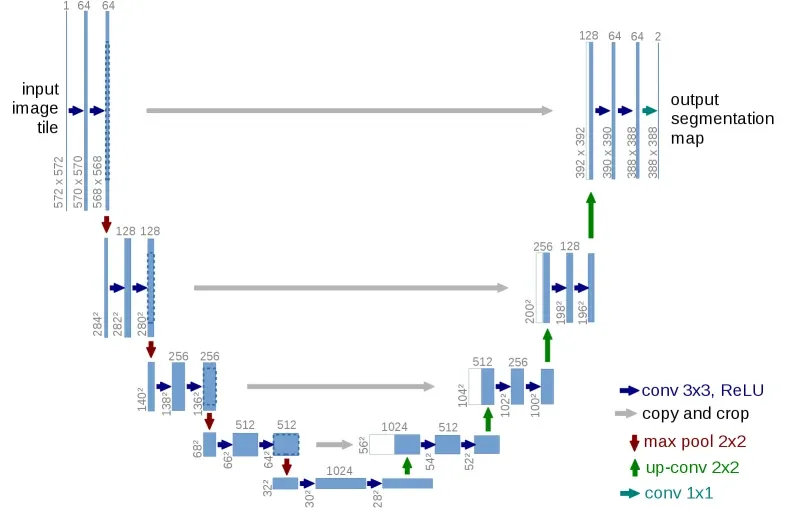
编码 Encoder
左侧是收缩路径(Contracting Path),即经典的 CNN 特征提取器。
随着网络加深,常规的 卷积配合 Max Pooling 不断压缩特征图的空间尺寸,同时 Channel 逐步翻倍(例如从 64 一路增加到 1024)。在这个过程中:
- 空间分辨率降低:位置信息变得模糊。
- 语义信息增强:网络越来越懂目标的整体轮廓和类别。
解码 Decoder
右侧是扩张路径(Expanding Path),负责将极小分辨率的特征图逐步还原回原始尺寸。
这就是上采样(Upsampling)。在 U-Net 及其后续演进的架构中,关于如何上采样,通常有两种截然不同的核心策略:
-
转置卷积(Transposed Convolution)
这是原版 U-Net 采用的方案(论文中称为 Up-convolution)。虽然名字带着转置,但它其实并不是卷积的逆运算。
转置卷积的优势在于参数可学习,网络可以通过反向传播自己决定如何“捏造”放大的细节。但它也存在致命缺陷:棋盘效应。
我们设定情景参数(只观察空间结构,所以假设权重都是 1):
- 输入特征图 :尺寸
- 卷积核 :尺寸
- 步长:,则输出特征图的尺寸为
则输入和卷积核的矩阵如下:
后续的计算落在实际工程上其实是直接调用底层框架的矩阵运算,但为了方便理解,我在这里给出两种等价视角:
-
分数步长卷积(Fractionally Strided Convolution)
-
内部插零
内部插零后,被撑成了一个 的稀疏矩阵 :
-
外侧补零
为了让卷积核扫过之后能得到 的输出,我们需要在 的最外围再做 padding:
-
标准 Conv
最后得到最终输出 。
-
-
重叠相加(Overlap-Add)
我们也可以理解成:输入特征图上的每一个像素,都与其对应的卷积核相乘,并“投影”到输出画布上。每投影一次都在输出画布上移动 格。
- 左上角像素 :在输出画布左上角印下一个 的全 1 矩阵。
- 右上角像素 :向右平移 2 格,印下一个 矩阵。此时与左边产生 1 列重叠。
- 左下角像素 :向下平移 2 格,印下一个 矩阵。重叠。
- 右下角像素 :向右下各平移 2 格,印下一个 矩阵。
-
棋盘效应(Checkerboard Effect)
最后得到的输出是一致的:
很明显,输出的结果极度不均匀,这种十字形亮斑在特征图很大时,就会形成如同国际象棋棋盘一样的网格状伪影。
用重叠相加的过程可以很简单发现:只有卷积核大小正好被步长整除(即恰好无重叠)时,才能避免效应。
-
插值缩放(Interpolation)
为了规避棋盘效应,现代视觉网络(包括 Stable Diffusion 中的 U-Net)更倾向于使用这种平滑且解耦的策略:
- 第一步(纯几何放大):使用双线性插值(Bilinear Interpolation)或最近邻插值,直接在空间维度上把特征图的长宽拉伸一倍。这一步没有可学习的参数,纯靠周围像素的值做线性平滑过渡。
- 第二步(特征提炼):紧接着接入一个常规的 卷积。因为上一步插值拉伸会让特征变得平滑且模糊,这个常规卷积的作用就是重新强化特征的锐度,同时将 Channel 减半,为后续的拼接做准备。
跃连
Skip Connection(跳跃连接)是 U-Net 能够实现高精度像素级预测的关键。
拼接(Concatenation)
与 ResNet 中用于缓解梯度消失的元素级相加不同,U-Net 的跳跃连接是在通道维度上进行的拼接。
这个操作的物理意义在于缝合语义与细节:
- 解码器的深层特征负责指明大方向:“这块区域大概是个细胞。”
- 编码器的浅层特征负责提供局部证据:“细胞的边界和纹理具体在这里。”
通过在对应层级将浅层特征直接引流到右侧,U-Net 在下采样时将容易丢失的边缘信息“存档”,在上采样时再作为局部线索提取出来。
裁剪(Crop)
在 U-Net 的原始论文实现中,还有一个小细节:特征图尺寸并不完全对齐。
原版 U-Net 在卷积时使用了 Valid Padding(无填充),这意味着每次经过 卷积,特征图的边缘都会损失两圈像素。因此,左侧 Encoder 输出的特征图,尺寸总是略大于右侧 Decoder 对应层级的特征图。
为了能够进行通道拼接,U-Net 在横向连接时必须执行裁剪操作:将左侧较大的特征图按中心裁剪至与右侧相同大小,再进行 concat。
当然,现代深度学习框架使用 Same Padding 就可以规避尺寸不匹配了。
演进
U-Net 最初针对的是生物医学领域的图像分割任务,但在扩散模型中焕发了新生。扩散模型中的去噪任务本质上也是极其纯粹的像素级预测:
输入一张带噪图,输出一张同尺寸的噪声预测图。模型同样需要兼顾全局内容的理解与局部纹理的生成。
在 DDPM 和 Stable Diffusion 中,U-Net 自然而然地成为了去噪器的主干。现代的 Diffusion U-Net 引入了 Time Embedding 来注入时间步信息,加入了 ResBlock 提升稳定性,并通过 Cross-Attention 让特征感知文本条件。