深度学习 08
GNN 基础1
生成模型基础4
Transformer 基础3
拆解 Adam
Adam 的完整过程可以拆成五步。
1. 当前梯度
假设在第 步,我们对某个参数求导,得到当前原始梯度:
它就是当前这一步的地形测量结果。
2. 一阶动量
Adam 会维护一个梯度的一阶指数移动平均值:
通常设置为 0.9。
这对应 Momentum 的惯性系统。
3. 二阶动量
Adam 同时维护一个梯度平方的指数移动平均:
通常设置为 0.999。
这对应 RMSProp 的刹车系统,负责记录某个参数历史梯度的剧烈程度:
- 如果 很大,说明这个参数过去经常震荡(环境恶劣),更新时应该收小步子。
- 如果 很小,说明这个参数一直比较平,更新时可以适当放大步伐。
4. 偏差校正
这是 Adam 中最容易被忽略的细节。
为什么需要校正?
因为初始权重对冷启动的影响太大了:
第一步时:
考虑 :
一开始的真实梯度明明是 ,但一阶动量只拿到了 10%。
二阶动量也有同样问题,而且因为 通常是 0.999,初期低估会更严重。
这种因为初始值为 0 导致的低估,叫向零偏置。
Adam 用下面两个式子修正:
训练越往后, 和 越趋近于 0,偏差校正的影响也就越来越小。
5. 最终更新
最终参数更新是:
这里:
- 是基础学习率。
- 提供方向。
- 提供每个参数的自适应刹车。
- 防止分母为 0。
Adam 的泛化问题
Adam 收敛很快,但在一些场景,尤其是早期经典 CV 模型复现中,大家发现古老的 SGDM 反而泛化更好。
一个常见解释:
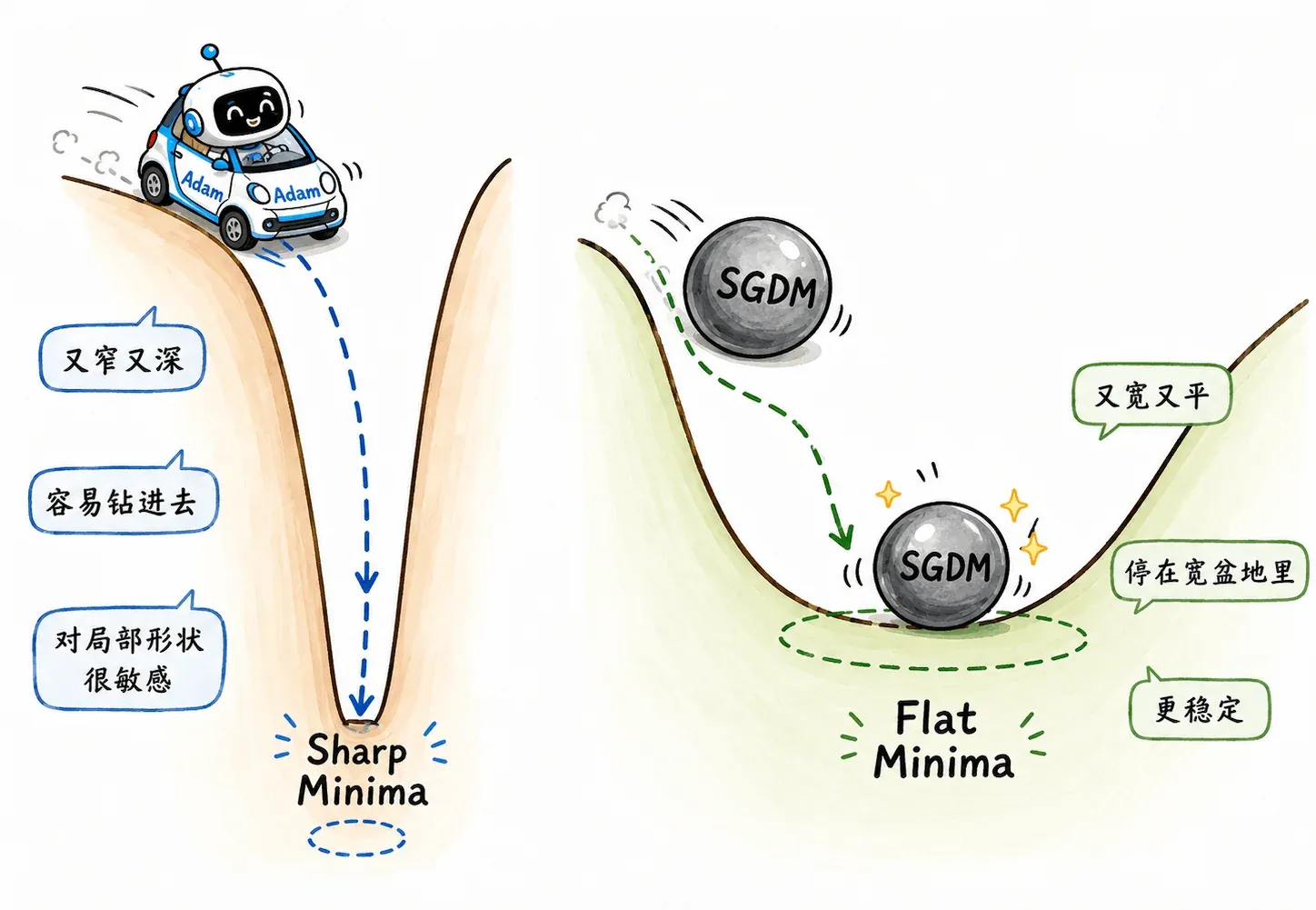
Adam 容易跑进 Sharp Minima,SGDM 更容易停在 Flat Minima。
Sharp Minima
可以想象成又窄又深的坑。
在训练集上,它的 loss 可能非常低。
但测试集稍微有一点分布偏移,参数一动就撞到陡峭坑壁,loss 立刻变差。
Flat Minima
可以想象成宽而平的盆地。
它在训练集上不一定是最极致的低点,但周围都比较平缓,测试数据稍微变化也不容易崩。
- Adam 因为每个参数都有自适应学习率,跑得很灵活,也更容易钻进狭窄深坑。
- SGDM 带着统一学习率和惯性,反而可能直接冲过某些窄坑,最后停在更宽的区域。
SWATS
既然 Adam 前期跑得快,SGDM 后期泛化好,那能不能让它们俩再配合起来?
SWATS (Switching from Adam to SGD) 人如其名,思路就是先用 Adam,后期切到 SGDM。
SWATS 在 Adam 模式下的训练过程中同步估算一个等效的 SGD 学习率。当这个等效学习率趋于稳定时,无痕切换到 SGD。
这个思路很清晰,但在实际工程中并不是主流。
这是因为后来 AdamW 用更简单的方式修掉了 Adam 泛化问题里的一个关键部分。
AdamW
L2 与 Weight Decay
在传统 SGD 里,L2 正则化和 Weight Decay 是等价的。
L2 正则化是在 Loss 后面加一项:
对它求导:
放进 SGD:
展开:
这说明在 SGD 语境下,把 L2 惩罚加进 Loss,等价于每次更新时把权重按比例缩小一点。而后者就叫 Weight Decay。
这是 SGD 时期的数学巧合。
Adam 失效
问题是,这个巧合在 Adam 里水土不服。
如果继续把 加到梯度里,它会进入 Adam 的一阶动量和二阶动量统计。
Adam 最终更新时有一个分母:
如果某个参数历史梯度很大,分母也会变大。这本意是为了给陡峭维度踩刹车。
但现在 L2 惩罚项也混在梯度里,它也会被这个分母一起缩小。
这就直接导致了荒谬结果:
越活跃、越该被惩罚的权重,反而可能因为分母巨大而逃过惩罚。
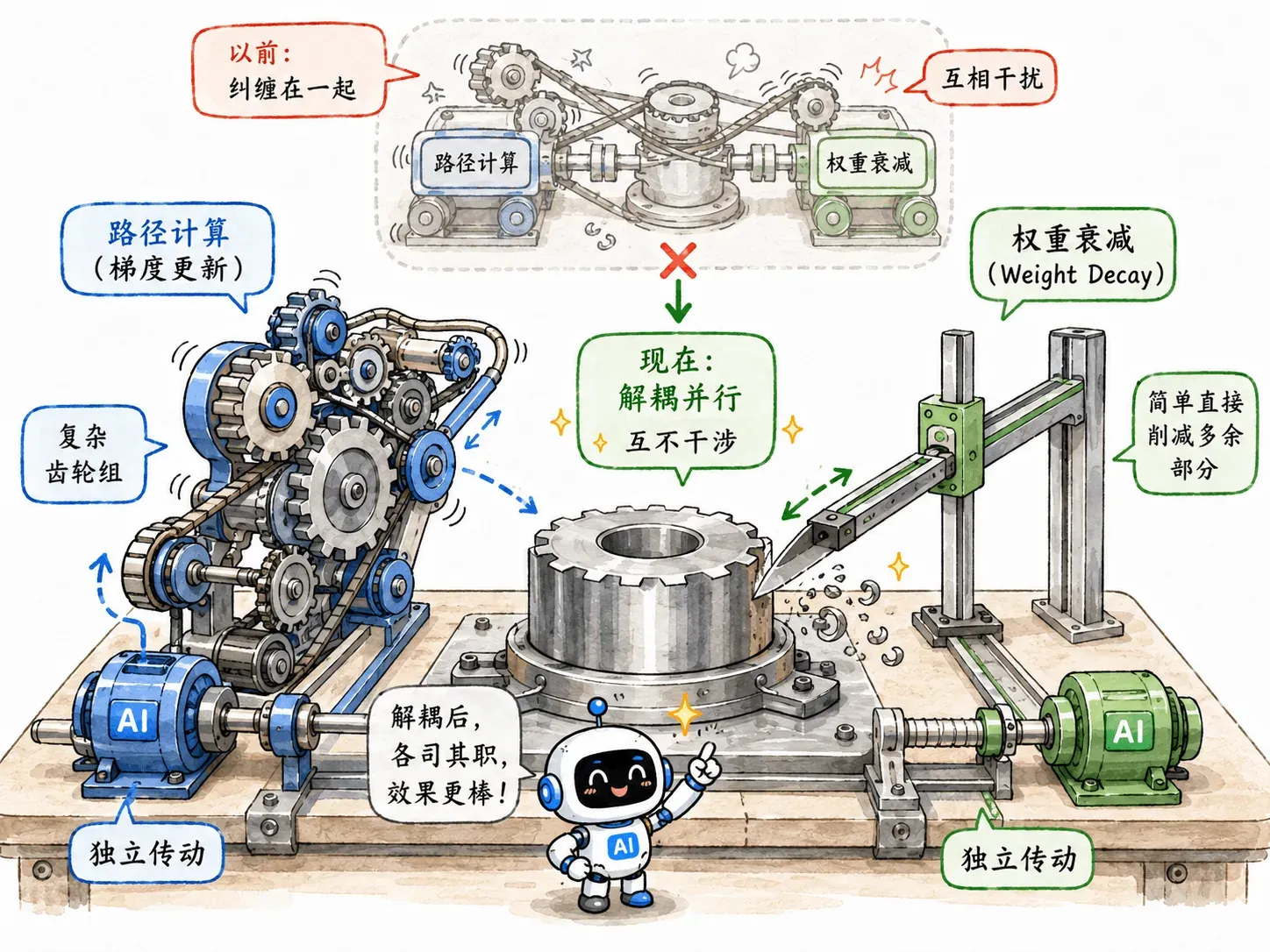
AdamW 诞生
AdamW 由此出现,它把两件事分开处理:
- 用纯净的数据梯度计算 Adam 更新。
- 单独对权重做衰减。
最终形式可以粗糙写成:
也就是:
惩罚项被抽离到了 Adam 分母外面。无论二阶动量有多大,权重衰减该罚多少罚多少。