深度学习 07
GNN 基础1
生成模型基础4
Transformer 基础3
反向传播计算出梯度,相当于给出了下山的方向。
但是步幅大小怎么调整?这是优化器要干的活。
Train Bad
如果把优化神经网络当成给模型看病,病症无非两种:
- 训练集效果差 (Train Bad)
- 测试集效果差 (Test Bad)
优化器主要处理的也是 Train Bad 问题。
当 loss 曲线像我的心电图一样平缓,或者在山谷间来回震荡就是降不下去时,就说明我们需要更换更聪明的下山策略了。
前面激活函数解决的是“梯度能不能传回来”。
优化器解决的是另一个问题:
梯度已经算出来了,怎么走才更快、更稳?
SGD
Stochastic Gradient Descent(随机梯度下降)是最古老、最符合直觉的策略。
核心思想
SGD 就像盲僧,只能用脚简单感受当前踩着的这一小块地。
哪里最陡,就直接往反方向迈出固定的一步。
这里的 是学习率。
它决定每次更新走多大一步。
致命痛点
SGD 的问题在于它极度短视,完全没有记忆。
如果恰好走到了一个狭长的 U 型峡谷中,悲剧就发生了:
- 觉得左边陡,向右猛跨一步。
- 到了右边发现也很陡,又向左猛跨一步。
结果在峡谷两壁之间疯狂横跳,真正该往前的路却走得很慢。
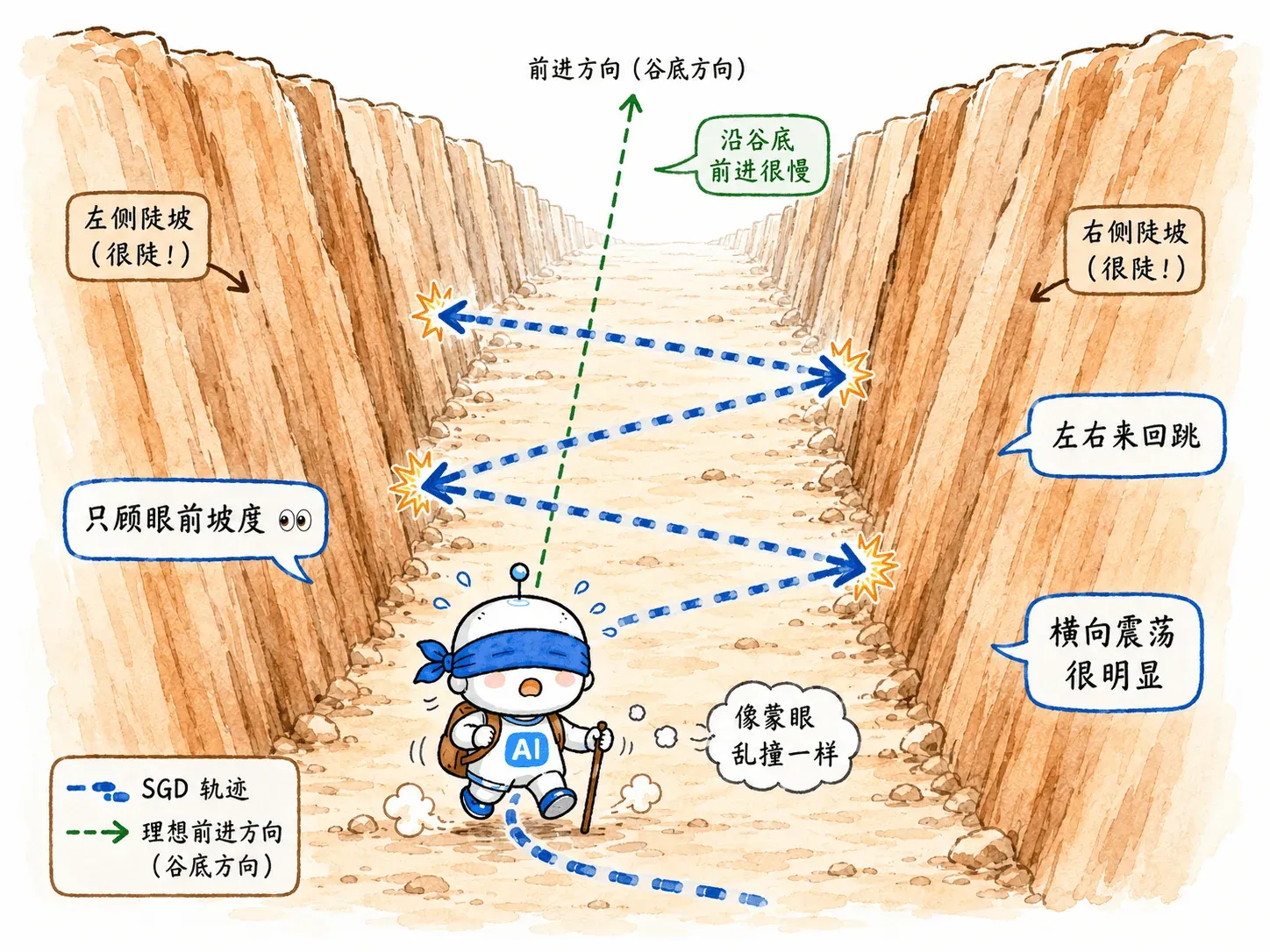
SGD 不是不知道方向。
它的问题是每一步只看当前梯度,不知道历史上自己一直在往哪个方向走。
SGDM
Stochastic Gradient Descent with Momentum(带动量随机梯度下降)是紧接而来的优化。
Momentum(动量)的出现,就是为了治好 SGD 的反复横跳。
核心思想
我们在盲僧身上绑一块大石头,引入物理学中的惯性。
当他顺着一个方向往下冲时,速度会慢慢叠加,越冲越快。
在计算梯度时,把历史方向的平均趋势也纳入考量:
为什么管用
- 通向谷底的正确方向:因为每次都在往下走,惯性不断累加,步伐越来越大,加速冲刺。
- 峡谷两壁的震荡方向:上一秒向左,下一秒向右,正负抵消。横跳的幅度被惯性强行抹平。
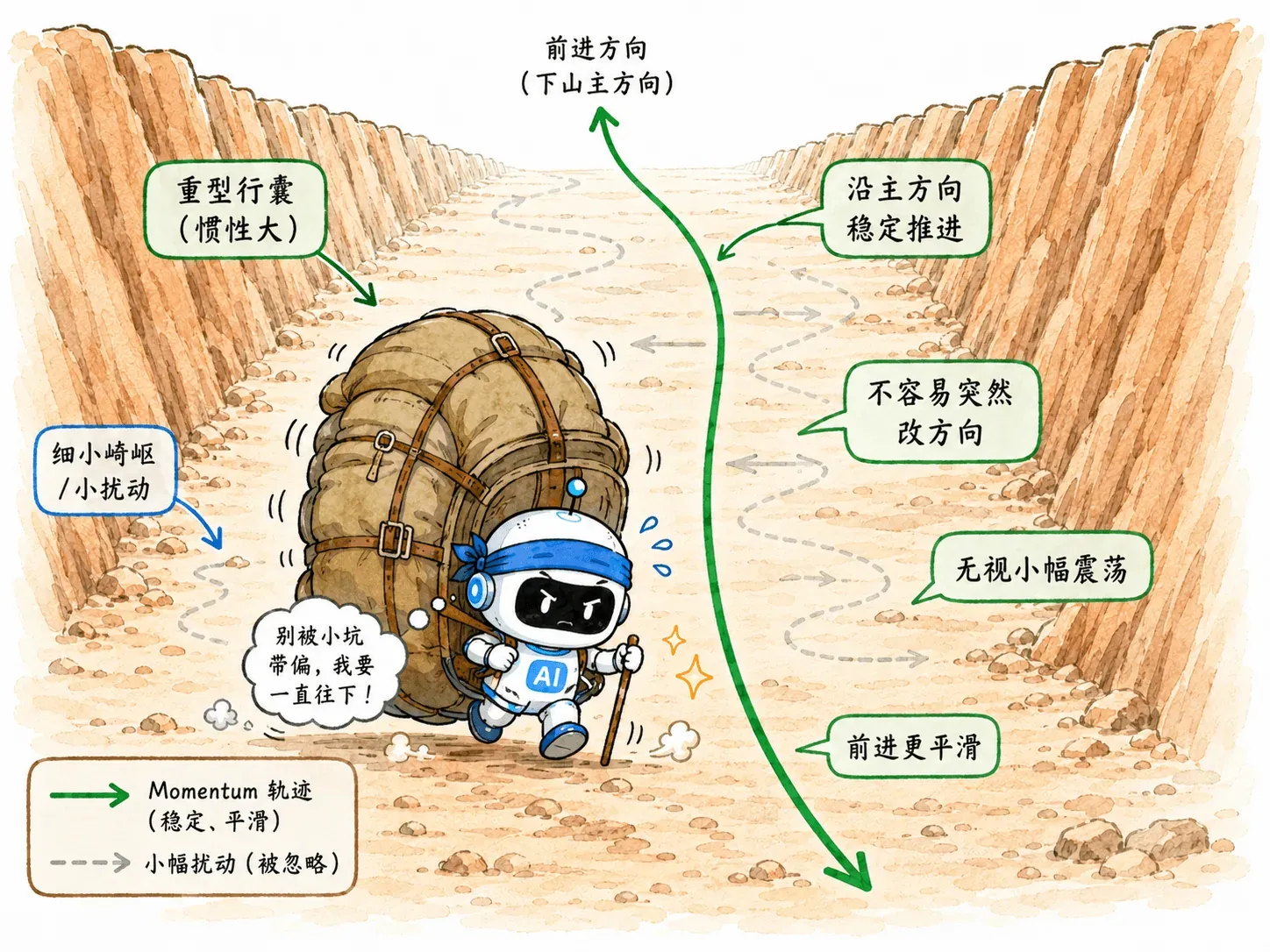
Momentum 没有给每个参数单独调整学习率。
它改变的是更新方向的稳定性。
它让参数不再只看脚下这一瞬间,而是带着过去的趋势一起走。
RMSProp
Root Mean Square Propagation(均方根传播)。
动量解决了方向问题,但还有问题没解决:地形极度不均匀。
核心痛点
神经网络动辄几千万个参数,也就是很多很多维度。
有些维度简直是悬崖峭壁,梯度长期很大。
有些维度又是一马平川,梯度长期很小。
如果所有参数都共用同一个步伐大小:
- 悬崖边的人一步跨进深渊。
- 平地上的人却像在原地踏步。
这就需要给不同参数配不同的步伐。
核心思想
RMSProp 给每一个维度都单独配备了智能刹车系统。
它悄悄记下了这个维度过去一段时间的平均陡峭程度,也就是梯度平方的指数移动平均。
更新时,把原始学习率除以这个历史陡峭度:
- 坡太陡? 分母变大,强制把步伐缩减。
- 坡太缓? 分母很小,放大步伐,鼓励多走一点。
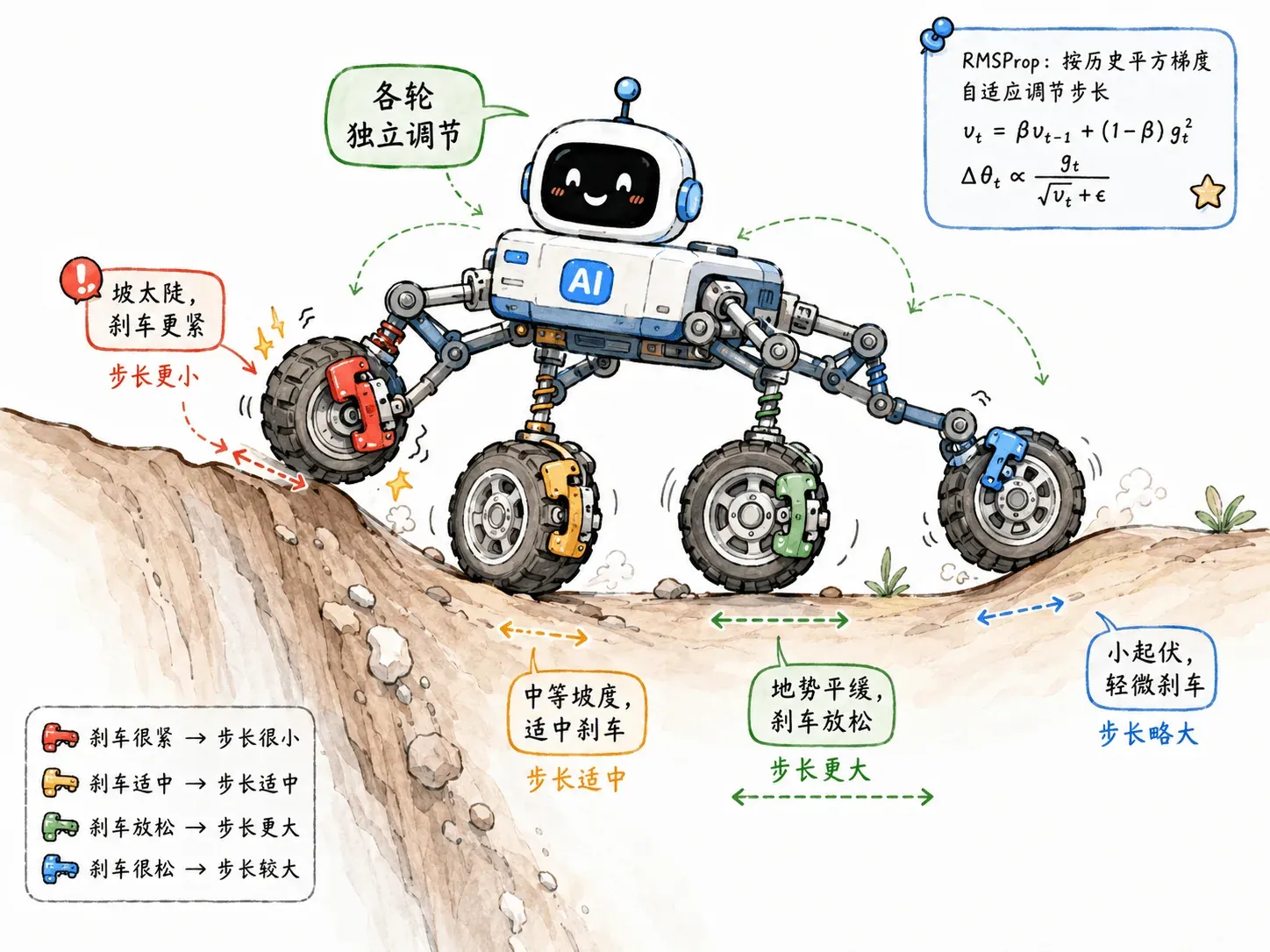
RMSProp 真正改的是每个参数自己的学习率。
它不是所有人统一迈一步,而是让每个维度根据自己的历史梯度情况调整步伐。
Adam
Adaptive Moment Estimation(自适应矩估计)。
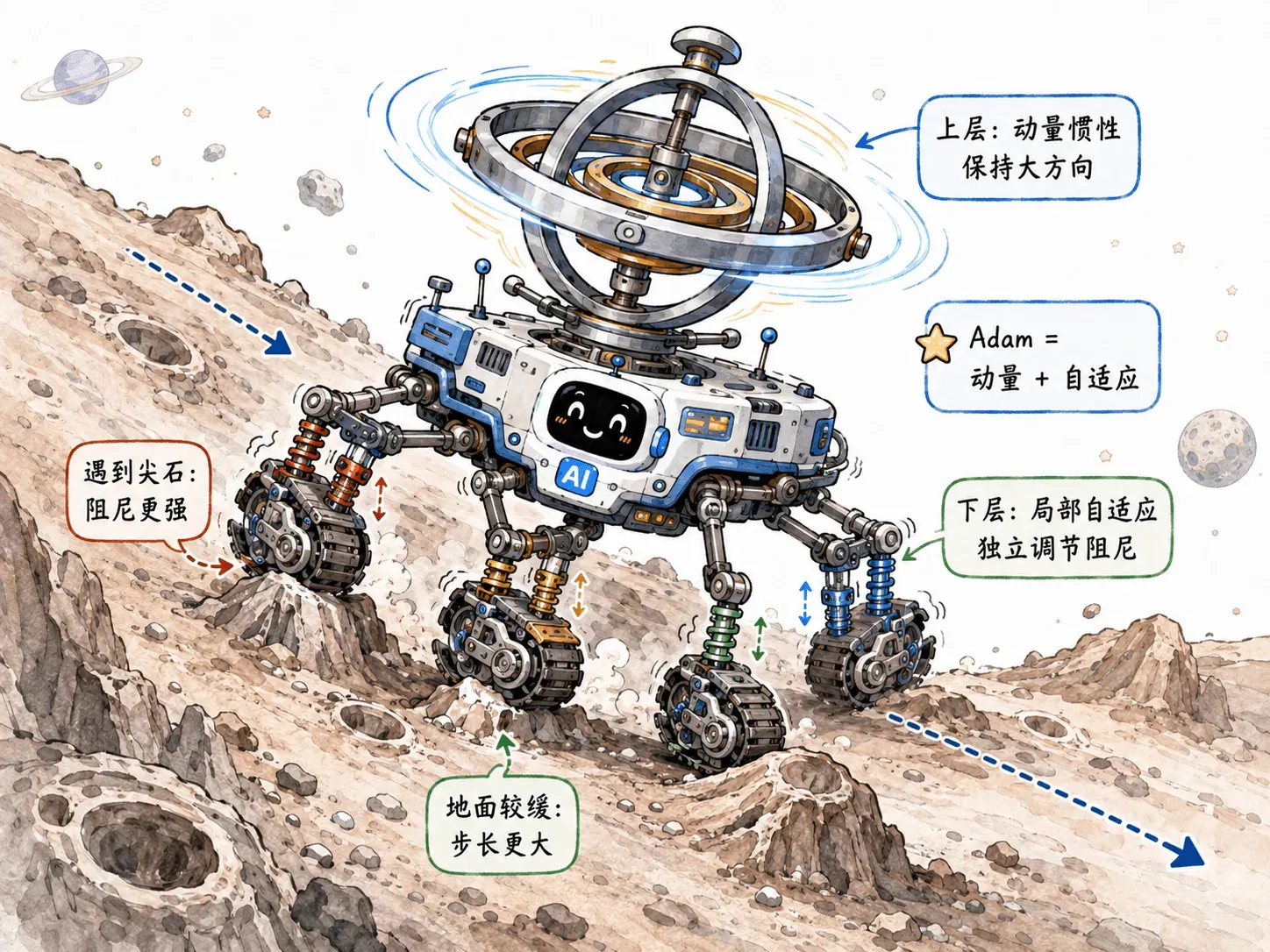
核心思想
看到这里,Adam 的诞生就顺理成章了。
既然 Momentum(动量) 擅长利用惯性找准方向,而 RMSProp 擅长根据地形自动调整步伐,那为什么不把它们缝合在一起呢?
于是,Adam 同时记录了两个东西:
-
方向积累(一阶矩 )
之前主要往哪个方向走?继承自 Momentum。
-
陡峭度积累(二阶矩 )
之前走过的路有多坑洼?继承自 RMSProp。
然后用它们一起指导下山:
就此,Adam 顺理成章地成为了深度学习时代的默认优化器。
需要注意,这里的 和 做了偏差校正。
这是因为 和 初始为 0,会导致训练初期对梯度统计严重低估。