CNN 05
GNN 基础1
生成模型基础4
Transformer 基础3
ResNet:残差学习的数学原理与架构演进
这一篇文章在看完 RNN 基础后食用更佳~
在 CNN 前几篇文章中,我们探讨了卷积操作提取局部特征的数学机理,通过特征可视化窥探了神经网络逐层抽象的“黑盒”过程,并在风格迁移与跨模态卷积的实践中,见证了深层特征在空间形态与高级语义上的强大解耦及泛化能力。
然而,这些令人惊叹的高阶视觉应用,都建立在一个隐式的前提之上:网络具备足够强大的特征提取与表征能力。直觉告诉我们,网络越深,其能够拟合的函数空间就越广,提取的特征层次就越丰富。但当研究者们真正尝试将网络深度推向极限时,却撞上了一堵无形的物理之墙。
今天,我们将回到现代深度学习架构的分水岭——2015 年何恺明团队提出的 ResNet(残差网络)。从网络退化这一核心痛点出发,深入拆解残差学习的数学原理、梯度回传机制以及架构设计。
网络退化问题 Degradation Problem
在 ResNet 诞生之前,以 VGG 为代表的经典卷积神经网络确立了“大道至简”的设计范式:通过持续堆叠小尺寸(3x3)卷积核,有效扩大感受野并增强非线性表达。
理论上,一个深层网络应当至少能够达到其对应浅层网络的性能底线。原因直观:我们完全可以在深层网络的后半部分构建恒等映射(Identity Mapping),使其直接输出上一层的结果。
但在实际的工程训练中,当网络层数激增(例如从 20层 跃升至 56层)时,研究者观察到了反常现象:网络退化问题。
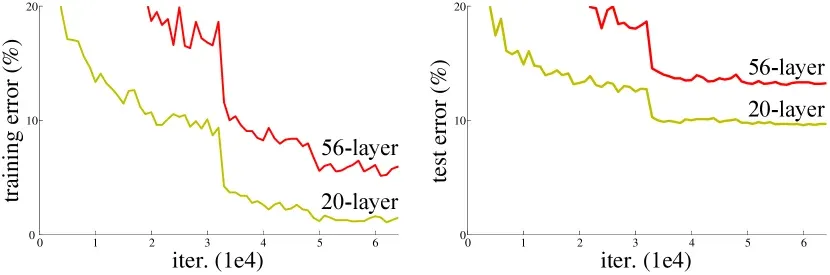
正如原论文实验所示,56层网络在训练集和测试集上的误差均显著高于20层网络。必须强调的是:
- 这并非过拟合(Overfitting),因为过拟合的特征是训练误差极低而测试误差高,但此处训练误差同样居高不下。
- 这也并非传统的梯度消失/爆炸,因为当时的现代网络已普遍配备了 Batch Normalization (BN) 层,确保了前向传递与反向梯度的方差稳定。
退化问题的数学本质在于:对于由非线性激活函数和权重矩阵组成的传统网络层(Plain Network),在高度复杂的非凸优化空间中,依靠随机梯度下降(SGD)去硬性拟合一个完美的恒等映射 是一个极其困难的优化陷阱。
在传统网络中,参数(权重矩阵)在最开始都是随机初始化的。
想象一下,如果把一个包含重要信息的 交给一层充满随机数字的矩阵进行乘法运算,结果会怎样?它会瞬间变成一堆毫无意义的噪声。
要想让这些随机的权重在训练中慢慢调整,直到能完美地把 原封不动地输出出来(恒等映射),这无异于让猴子敲出莎士比亚著作。
残差块 Residual Block
为了解开这一死结,ResNet 引入了深度残差学习框架(Deep Residual Learning Framework)。
数学表达
假设某几层神经网络原本期望拟合的潜在最优映射为 ,其中 为该模块的输入。
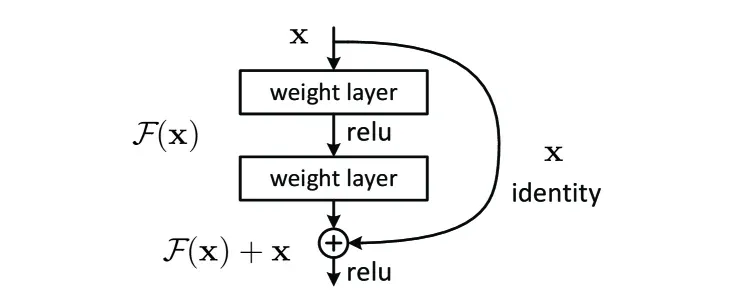
传统网络的解法是让堆叠的权重层直接逼近 ;而 ResNet 进行了一次精妙的数学重构:将网络需要学习的目标转化为残差映射(Residual Mapping):
此时,原始的映射关系即被等价重写为:
在工程拓扑上,这一公式体现为在网络主干侧边架设的一条捷径连接(Shortcut Connection / Skip Connection)。
优化直觉
为何这种转化能产生奇效?
如果此时网络的最优状态恰好就是恒等映射,神经网络只需将非线性主干部分的权重参数全部衰减至 0(使得 ),即可轻松实现 。相比于用极其复杂的非线性矩阵去“捏造”一个恒等输出,将参数归零显然是一条阻力极小的捷径。残差连接赋予了深层网络一个绝对无损的“保底机制”。
事实上,在现代深度学习的很多实践中,大家都会把每个残差块的最后一层权重初始化为 0。
这样一来,网络在训练的最开始,输出就绝对等于 。网络先从不破坏输入的状态起步,然后再慢慢学习如何锦上添花。
反向传播 BP
除了正向传播的恒等保底,ResNet 能够在成百上千层的深度下保持收敛,其深层数学威力体现在反向传播时的梯度流动(Gradient Flow)上。
数学推导
我们将残差块的计算推广至任意层。假设第 层的输出为 ,经过残差函数 计算并与前向信号相加后得到下一层输出:
将上述递推公式展开,从较浅的第 层一直推演至极深的第 层,可得:
其揭示了 ResNet 网络的颠覆性特征:深层特征 等价于浅层特征 与所有中间残差函数总和的加性叠加。这彻底打破了传统网络中特征按层连乘传递的壁垒。
在此基础上,根据链式法则求解损失函数 对浅层输入 的梯度:
观察括号中的核心项,可以被拆分为两部分:
- 常数 :这一项如同高速公路,将深层的误差信号 高质量地传回浅层 。
- 复合梯度项:需要经过多层权重链路反向计算的常规梯度。
在极深的网络架构中,即便复合梯度项因层层连乘而趋近于 0(即传统意义上的梯度消失),常数 的存在依然确保了反向传播通道的绝对顺畅。这种加性结构从微积分的底层逻辑上,彻底避免了梯度危机。
学完 LSTM 再往回看,颇有异曲同工之妙。
架构设计 Basic vs. Bottleneck
在追求极度深度的实践中,算力瓶颈是一个无法回避的工程现实。ResNet 为此设计了两种不同量级的残差块结构。
-
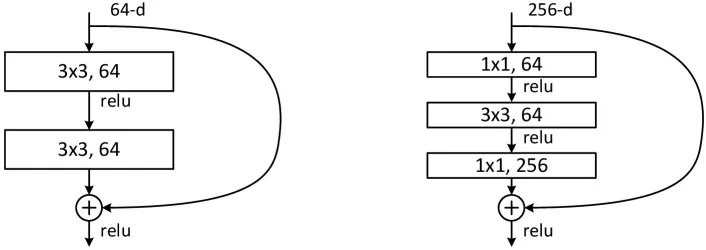
基础残差块 (Basic Block)
多用于中等深度网络(如 ResNet-18, ResNet-34)。它由两个 3x3 的卷积层串联构成。
当输入与输出特征图的通道维度不一致时,会在捷径上额外施加一次 的线性投影 ,即 ,以完成维度对齐。
-
瓶颈结构 (Bottleneck Block)
当网络深度下探至 50层、101层甚至 152层时,基础块的计算开销将呈指数级膨胀。为此,研究团队引入了由 1x1 3x3 1x1 组成的“沙漏型”三层结构:
- 降维:首个 1x1 卷积负责将高维通道数大幅压缩。
- 特征提取:在压缩后的低维空间内,执行计算密集的 3x3 卷积。
- 升维:末尾的 1x1 卷积将通道数重新拉伸至原维度,以便与捷径传来的主干信号融合。
瓶颈结构以极小的参数量与计算代价,维持了与基础块等效的特征表达能力,是支撑百层级深度网络落地的核心工程构件。
架构分歧 ResNet or Highway
在探讨跳跃连接的演进路线时,学术界曾出现过另一条分支:Highway Networks。受到 RNN 序列模型中 LSTM 机制的启发,Highway 尝试将门控机制(Gating)直接移植到前馈神经网络中:
其中 为变换门, 为携带门。
从数学形态上看,ResNet 实际上是 Highway 的一种极简特例(即强制 )。但在空间特征的提取任务中,ResNet 却取得了压倒性的胜利:
-
图像与序列的数据差异
- 在自然语言等时间序列中,信息存在长程依赖与噪声,必须依赖复杂的动态门控进行取舍。
- 但在视觉图像的层次化特征提取中,底层的边缘与顶层的语义同样重要,网络需要的是无障碍的特征积累,而非刻意的遗忘。
-
更省算力,梯度更稳
- Highway 需要耗费庞大的参数去计算门控矩阵;且在 极小的情景下,没有有效解决梯度链条断裂的风险。
- ResNet 无参数的纯加性捷径,不仅释放了海量算力,更确保了优化的绝对稳定性。
结语 Conclusion
ResNet 提出 的结构性优化,不仅解决了深层视觉模型的训练难题,更确立了现代 AI 模型设计的底层基调。今天,无论是主导语言生成的 Transformer,还是融合多模态的 VLA 模型,其核心算子的外围,依然包裹着这层简洁而强大的残差连接。