生成模型 03
GNN 基础1
生成模型基础4
Transformer 基础3
传统的 Encoder-Decoder 架构的硬伤在前文中已经多次提及。
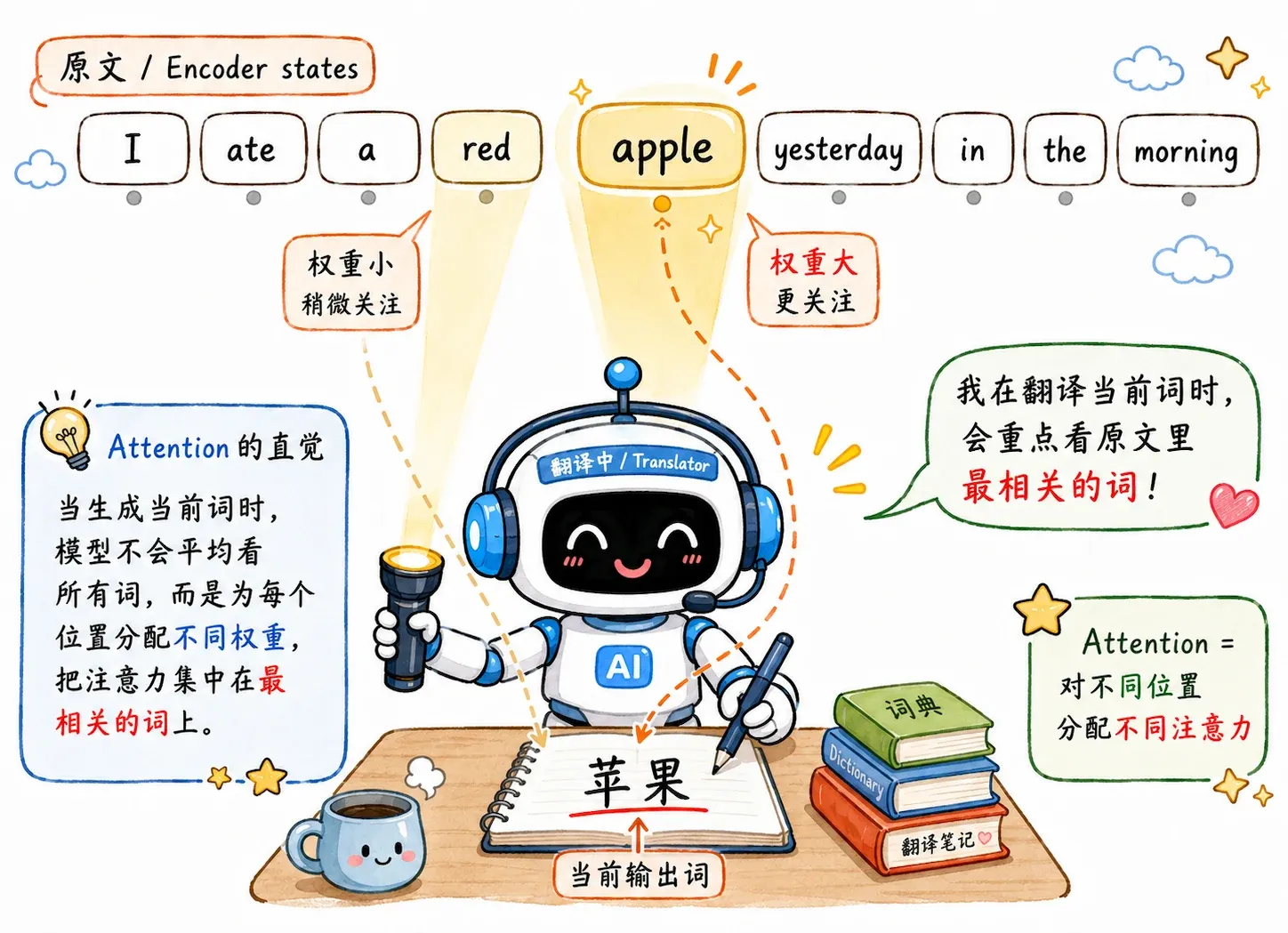
Attention
当 Decoder 准备憋出下一个词时,终于不再只是死盯着 Context Vector(已经爆满的瓶颈向量)。
-
Decoder 拿出自身当前(或上一步)的隐状态,分别和 Encoder 每一个时间步留存的隐状态计算匹配分数。
-
将所有匹配分数在输入序列维度做 Softmax 归一,所有权重总和为 ,得到一组注意力权重
-
用这组权重对 Encoder 全部隐状态加权求和,生成解码第 步专属的动态上下文向量 :
就像是在原文上滑动的手电筒光束,数值越高代表解码当前词时越聚焦对应输入位置。
需要注意,这里的 Attention 发生在一个序列(Decoder)去跨界观察另一个序列(Encoder)的隐状态上。这与后来 Transformer 赖以成名的 Self-Attention 有着本质的区别——Self-Attention 是让同一个序列内部的 Token 之间互相审视和读取。
无论如何,这套机制让模型学会了按需读取记忆。
Attention 的视觉流程:Visualizing A Neural Machine Translation Model 。
Memory Network
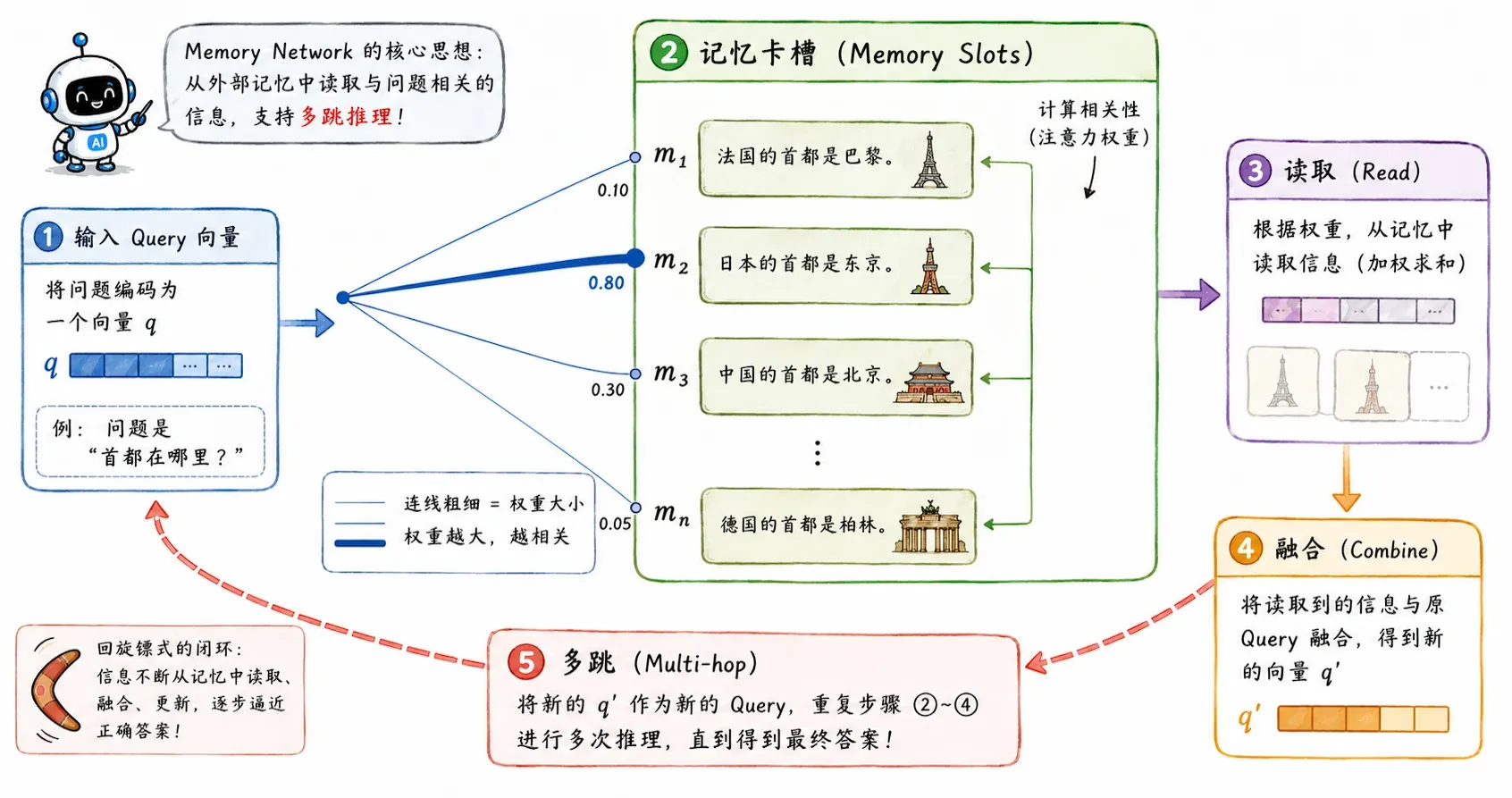
既然 Attention 可以在句子的隐状态里“淘宝”,那难免让人想更进一步:是不是可以在更大的外部数据库里找东西?
Memory Network(记忆网络)就这样水灵灵地出现了。
假设我们把一整篇长文档拆成很多个句子,每个句子都编码成一个向量,整整齐齐地码放在一块 Memory(内存)里。当用户抛来一个问题 时,模型就用 去和 Memory 里的每一条记录做 Attention 匹配,把最相关的信息拽出来。
如果遇到复杂问题,它甚至可以把第一次取出的线索和原问题合并,再拿着升级后的问题去 Memory 里查第二次、第三次——这就是极具前瞻性的 Multi-hop(多跳推理)。
有没有 RAG(检索增强生成)和 Agent 记忆池的味道?这说明虽然现代工程系统的形态愈发庞大,但底层依然在解决同一个问题:面对当前问题,我到底怎样才能从茫茫记忆中,精确检索出所需信息?
NTM
Memory Network 相对还是保守,它偏向于只读。
Neural Turing Machine(NTM,神经图灵机) 的野心就大得多了。它希望神经网络拥有一块可以自己决定读写的“外接硬盘”。
它引入了一个 Controller(RNN/LSTM/GRU),外加一块二维的 Memory 矩阵。Controller 通过类似 Attention 的寻址机制,决定去内存的哪个地址读、哪个地址写。写入还拆分成两步动作:
- Erase: 先抹除该位置过时的信息。
- Add: 再写入新鲜的信息。
这种硬核设计,实际上是在尝试用可微的数学公式,去逼近经典的计算机冯·诺依曼架构。
Pointer Network
普通 Decoder 的输出空间被限制在预先定义好的固定词表(Vocabulary)里,这就会出现 OOV(Out-Of-Vocabulary)问题。
Pointer Network(指针网络)给出了一个暴力解法:
Attention 权重落在哪个输入元素上最高,直接把那个元素作为结果丢出去。
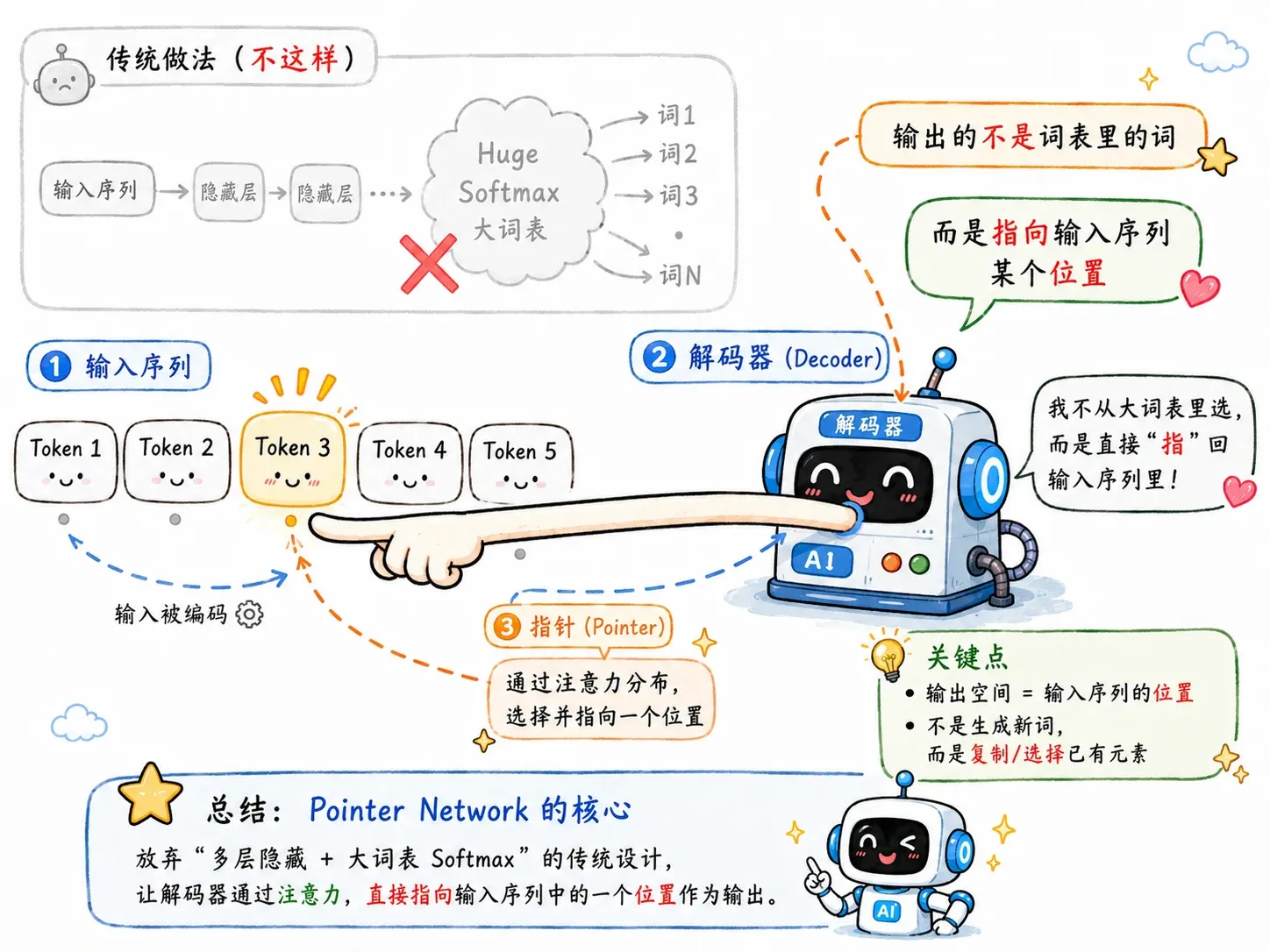
在 NLP 领域,这个思想后来演化成了极为重要的 Copy Mechanism(复制机制)。做文本摘要遇到没见过的奇葩人名、地名时,与其让模型抓耳挠腮地用固定词表硬拼,不如直接从原文里复制粘贴,堪称神来之笔。
Recursive Network
最后提一嘴 Recursive Network(递归网络)。
RNN 的底色是链式的,但人类的语言并不总是这样,句子往往潜藏着复杂的树状语法:几个单词合并成短语,短语再合并成从句,最后拼成整句。
Recursive Network 试图把共享的神经网络函数,强行挂载到这样一棵树状结构上。每次合并两个子节点,得到一个父节点表示,一路向上,直到得到整棵树的根节点。
这条路线虽没能像 Transformer 那样名垂青史,但它留下的工程哲学值得我们思考:每一次架构设计,本质上都是我们在强行往模型里塞入某种“结构先验”。
- RNN 关于时间顺序的先验。
- CNN 关于空间局部性的先验。
- Recursive Network 关于语法树的理想化先验。
而后来一统天下的 Transformer 之所以如此可怕,恰恰是因为它用 Self-Attention 放宽了所有的结构假设。它把所有元素铺开,让数据自己决定联系。