机器学习 03
GNN 基础1
生成模型基础4
Transformer 基础3
线性回归里简单介绍了梯度下降相关概念,但没有展开讲。
这里就专门说说梯度下降的细节,尤其是学习率相关的内容。
计算原理
梯度下降是什么
梯度下降的目的我们已经探讨过了:
调整模型参数,让损失函数的值尽可能小。
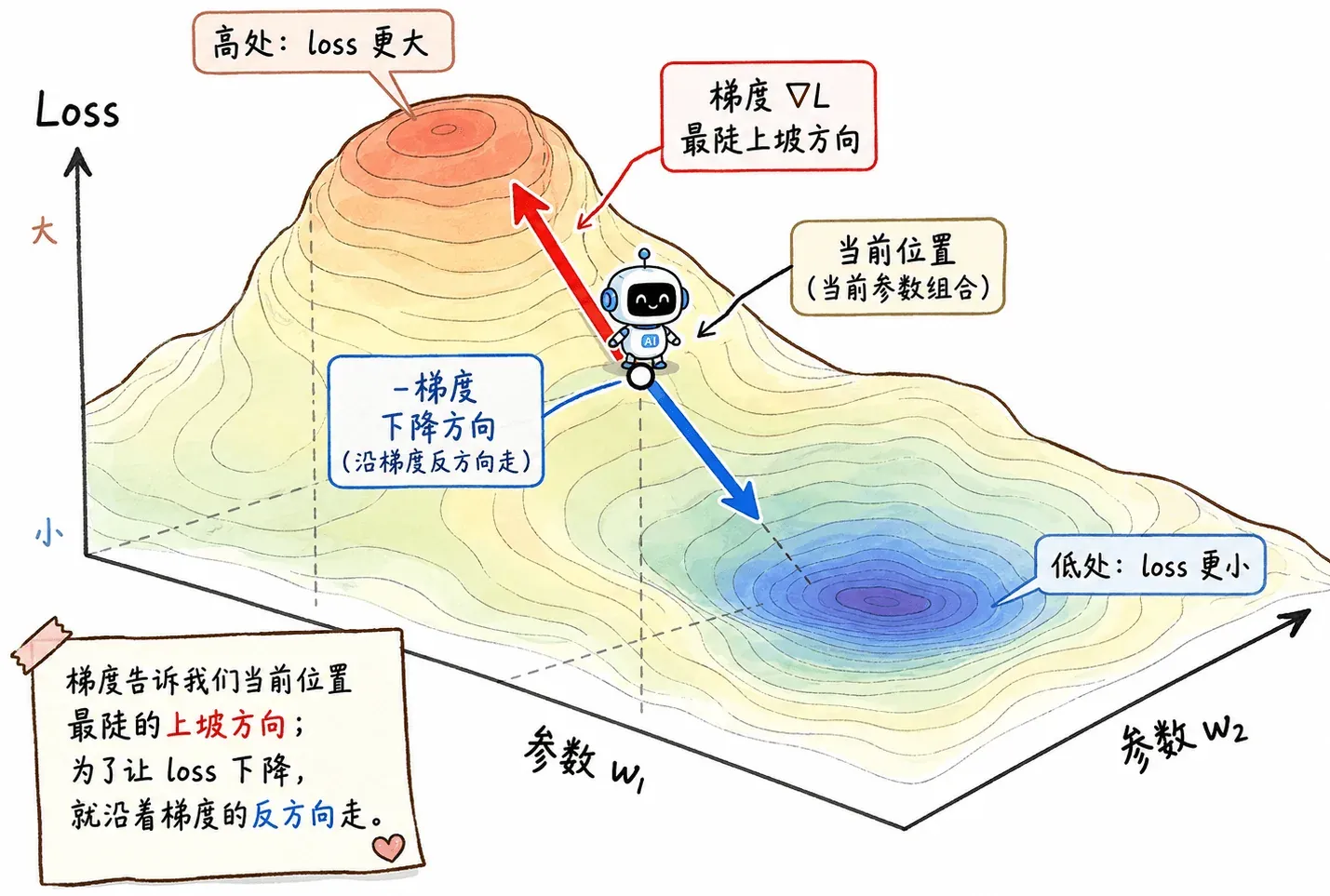
如果把损失函数想象成一张地形图,特定的参数组合就是这张地图上的一个坐标。
当前位置越高,说明 loss 越大;当前位置越低,说明 loss 越小。
我们想要做的事就是从随机选的起点出发,沿着地形图往下走,找到最低点。
梯度的数学定义就是“指向函数值增长最快的方向”,即当前位置最陡的上坡方向。既然我们想让 loss 下降,那就正好沿着梯度的反方向走。
机器学习里的大量优化问题,底层都绕不开这个动作。
梯度下降全流程
梯度下降可以拆成几个动作:
- 初始化参数,为每一个特征都先随机选一个 权重和一个 偏置。
- 计算当前参数下的梯度 。
- 按梯度反方向更新参数。
- 重复第 2 步和第 3 步,直到满足某个停止条件(比如 loss 足够小,或者迭代次数达到上限)。
梯度计算
讲了这么多前置知识,现在就要开始硬核内容了:当前梯度是怎么算的?
用最简单的单特征线性回归场景分析。模型是:
损失函数用 MSE:
梯度即为损失函数对参数的偏导数。也就是说,我们分别问:
- 动一点,loss 会怎么变?
- 动一点,loss 会怎么变?
算出来是:
这里 是模型当前的误差。误差越大,梯度通常也越大,说明这个参数方向上还有比较明显的调整空间。
如果是多个参数,形式也差不多:每个参数各算一个偏导数,然后把这些偏导数组在一起,就是当前的梯度 。
更新公式
写成公式就是:
其中 是当前梯度, 是学习率,也就是常见的 lr。
梯度决定方向,也带着当前坡度的信息;学习率则像人为设定的步长,决定模型每次迈出去多远。
导数正负
如果只有一个参数,可以直接看导数的正负:
- 导数小于 0,说明 增大时 loss 会变小。
- 导数大于 0,说明 减小时 loss 会变小。
这就是为什么更新公式里要减去梯度。梯度指向的是上坡方向,想下山就反着来。
如果模型有多个参数,就要计算损失函数对每个参数的偏导数。每个参数沿自己的方向更新,整体合起来就是一次参数移动。
学习率
固定步长
学习率如果太大,在更新权重时模型可能一步迈过头,在最低点附近来回震荡,甚至直接飞出去。
学习率如果太小,模型虽然方向对,但 loss 降得太慢,训练的时间会很长。
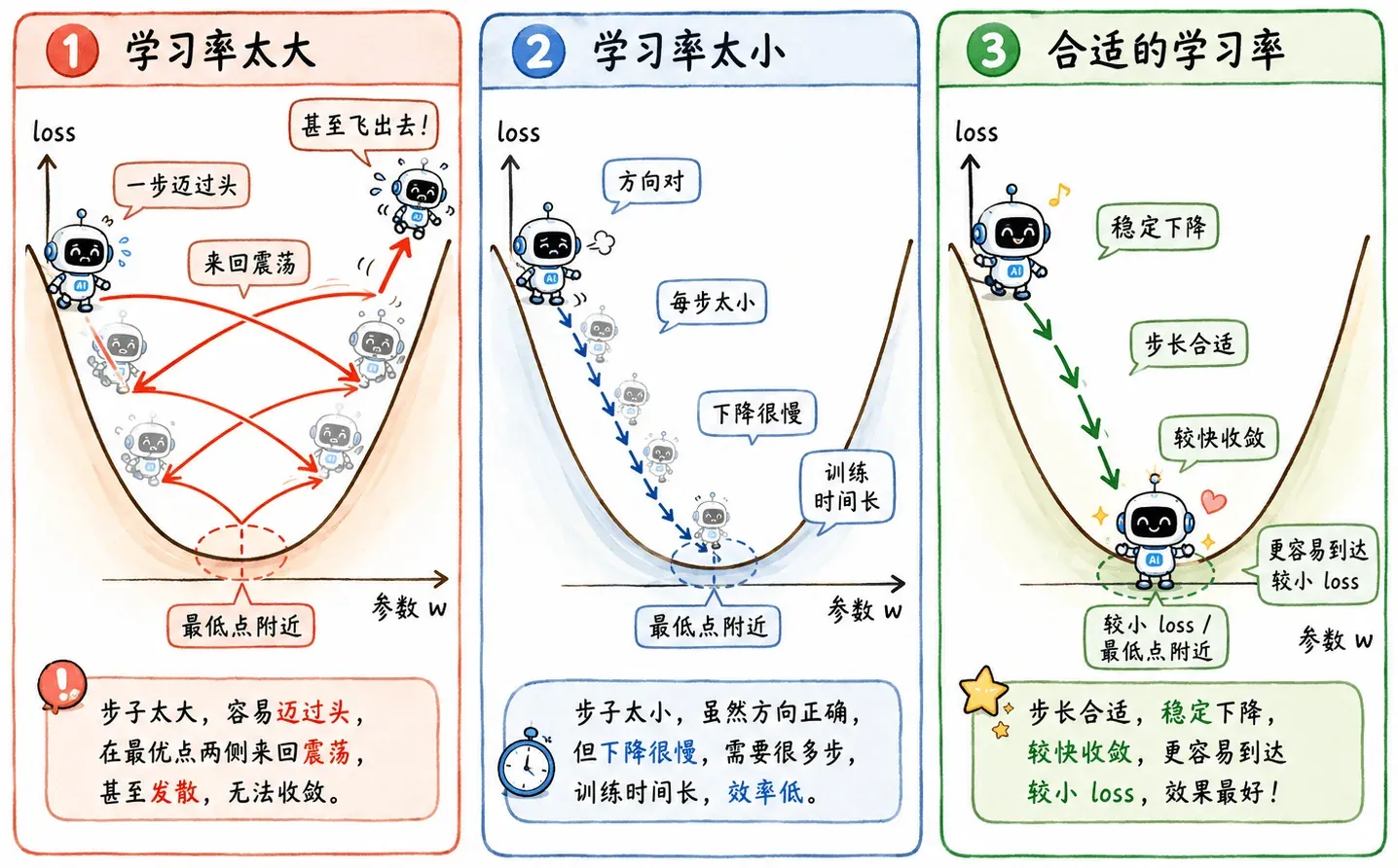
所以固定学习率肯定不够理想。
一个最朴素的优化思路是:刚开始离目标远,可以走快一点;后面接近低点了,就应该走慢一点。
自适应学习率
Adaptive Learning Rate
比如:
随着迭代次数上升,学习率逐渐变小。
优化总是做不完的,接下来难免又会提出进一步问题:可不可以为每一个参数都定制一个学习率?
可以想象成一张复杂的多维地图:有的方向是陡坡,有的方向是缓坡;有的参数方向很敏感,稍微动一下 loss 就变化很大;有的参数方向很迟钝,走很久才有变化。
Adagrad
Adaptive Gradient Descent
定义
Adagrad 的核心当然还是自适应学习率。
它的更新形式可以粗略写成:
其中 记录的是第 个参数到目前为止的历史梯度平方和:
这个历史记录,可以代表某个参数方向过去到底“陡不陡”:
- 如果某个方向历史梯度一直很大,说明这个方向比较陡,更新时就应该小心一点。于是分母变大,步幅变小。
- 如果某个方向历史梯度一直很小,说明这个方向比较平缓,就可以相对走大一点。
看似矛盾
初接触 Adagrad 时,会感觉参数之间有矛盾性:
- 当前梯度 大,参数更新步幅变大。
- 历史梯度平方和 大,参数更新又步幅变小了。
其实它们针对的根本就不是同一维度:
- :当前瞬时坡度。
- :这个方向的过往长期特征。
一个看现在,一个看过去。相除之后,反而能实现配合:
- 陡峭方向:历史梯度大,分母大,小步慢走,防止震荡。
- 平缓方向:历史梯度小,分母小,相对大步,帮助收敛。
后期走不动
当然,Adagrad 也有自己的问题:因为历史梯度平方和只会不断累加,分母会越来越大,后期学习率可能衰减得太厉害,最后几乎走不动。
在后面学到更深入内容(神经网络)时,会再提到一些改进算法。
用多少数据算梯度
梯度下降还有一个重要维度:每次用多少数据来算梯度。
BGD
Batch Gradient Descent
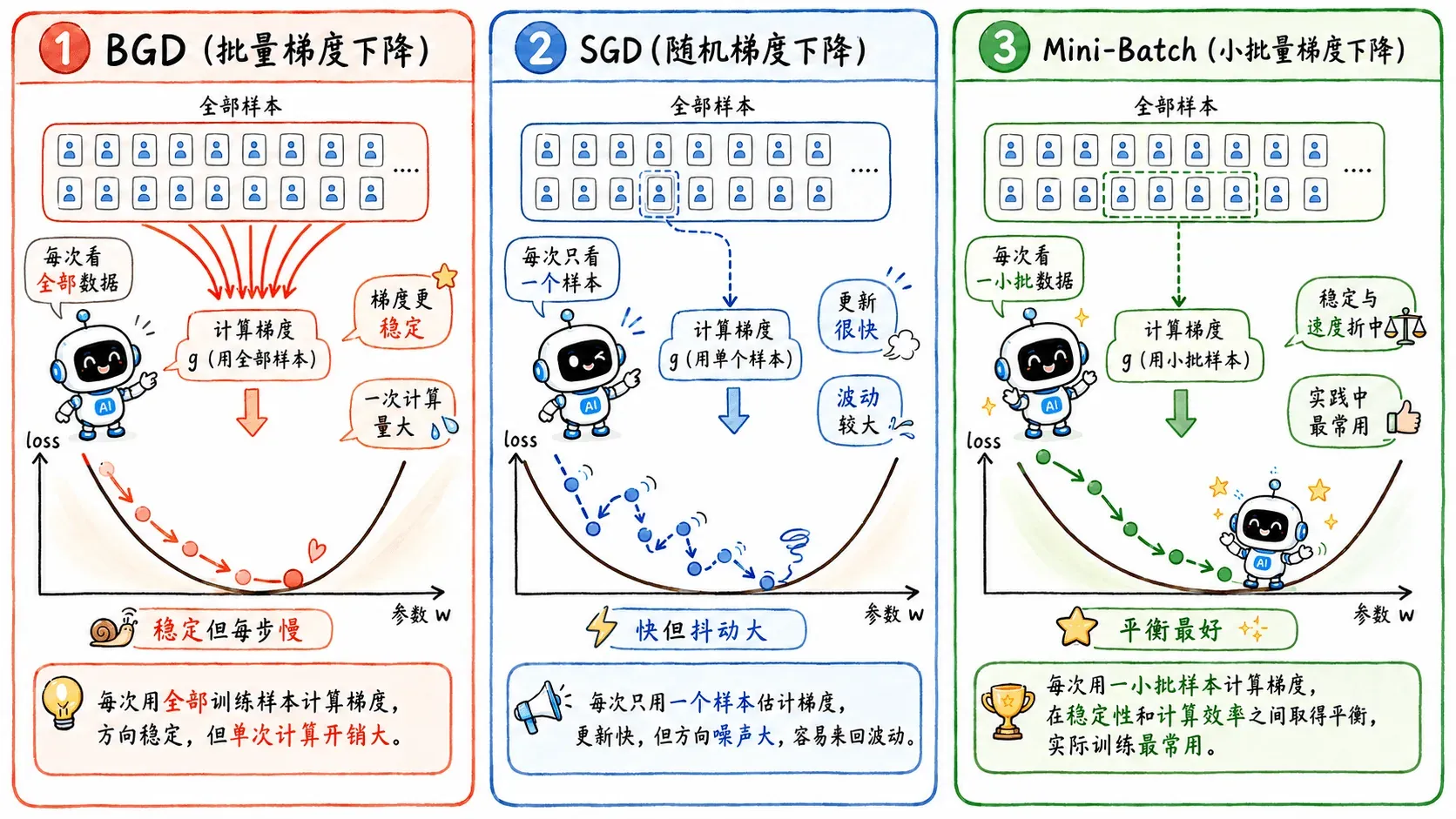
- 每次用全部训练集计算梯度。
- 优点:梯度方向比较稳定,更新比较靠谱。
- 缺点:每次更新都要扫完整个训练集,数据集大了就太慢了。
SGD
Stochastic Gradient Descent
- 每次只用一个样本计算梯度。
- 优点:更新很快,看一眼样本就走一步。
- 缺点:受噪声影响很大,方向不稳定。它可能整体是在下山,但具体每一步都歪歪扭扭。
Mini-Batch
Mini-Batch SGD 则是折中:每次用一小批样本。
它既不会像 BGD 一样每一步都重得要命,也不会像 SGD 一样每一步都太随机。
这也解释了为什么训练神经网络时会有 batch size 这个东西:它决定了模型每次拿多少样本来估计当前应该往哪走。