比起直接从噪声一步生成图片,不如学习如何一步步去噪。
毁灭比创造更容易。
前面的文章中,我们已经讨论过 PixelRNN、VAE 和 GAN 了。这些早期的生成模型在思路上有一个共同点:它们大多试图通过网络结构设计,将一个隐变量(通常是简单的随机噪声)“一步”或通过一次前向传播映射成高清的真实图像。
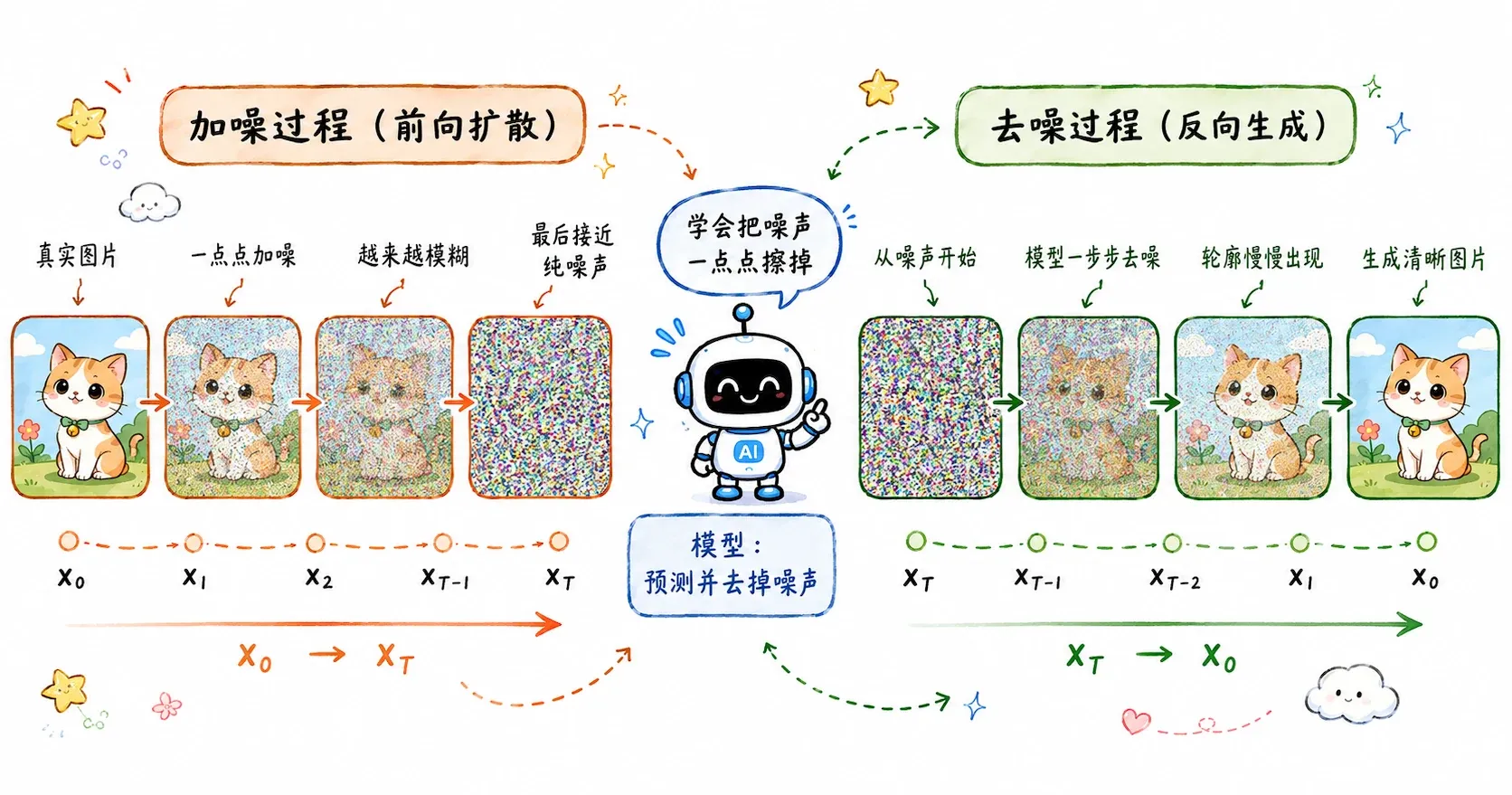
而扩散模型(Diffusion Models)则提供了一个完全不同的视角:既然直接生成高清图像很难,那我们可以先将一张清晰的图片一步步打碎成纯噪声,记录下这个过程;然后训练一个模型,让它学会把这个过程倒放,一步步从纯噪声中恢复出原本的图像。
其思想最早可以追溯到 2015 年一篇受非平衡热力学启发的论文。但直到 2020 年 Ho et al. 提出了 DDPM,扩散模型才真正在视觉生成领域大放异彩,并在此后逐步击败了 GAN。
DDPM
DDPM(Denoising Diffusion Probabilistic Models,去噪扩散概率模型)的伟大之处并不止于发明前向加噪这个物理过程,更在于它通过一系列精妙的参数化技巧和极简的目标函数,把一个原本在数学上极其复杂、难以计算的概率模型,变成了一个在工程上极其容易训练的深度学习任务。
前向过程 Forward Process
前向过程是一个纯粹的数学过程,不需要模型去进行学习。它的目标是:给定一张真实的干净图片 x0,在 T 个时间步内,不断向其中注入微小的高斯噪声。
在任意时间步 t,单步的加噪过程可以表示为:
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)
符号拆解
-
q(xt∣xt−1)
条件分布:表示在已知第 t−1 时刻图像的情况下,第 t 时刻带噪图像的概率分布。
-
N(⋅; μ, Σ)
多元高斯分布,格式可以记成 N(x; μ, Σ)。其中 x 是随机变量,μ 是均值向量,Σ 是协方差矩阵。
-
均值:μ=1−βtxt−1
- βt∈(0,1):预先设置好的噪声调度系数(随时间步 t 缓慢增大)。
- 原图 xt−1 乘上一个略小于 1 的缩放系数,意味着在加入噪声的同时,保留一小部分上一时刻的图像信息。
-
协方差:Σ=βtI
- I 为单位矩阵,代表图像中每个像素的加噪过程是相互独立的。
- 噪声的方差等于 βt。βt 越大,当前这一步注入的高斯噪声就越强。
这里的 βt 构成了预先定义好的噪声调度表(Variance Schedule),控制着每一步加噪的强度。当总时间步 T 足够大时,图像的信息被完全破坏,最终的 xT 会变成一个各向同性的标准高斯噪声。
公式解析
如果每次都要从 t=1 一步步推导到 t,计算成本会非常高。幸运的是,基于高斯分布叠加依然是高斯分布的优雅性质,我们可以直接推导出任意时间步 t 的加噪图像 xt。
如果我们定义 αt=1−βt,并记其累乘为 αˉt=∏i=1tαi,那么从 x0 直接到 xt 的分布可以表示为:
q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I)
结合重参数化技巧(Reparameterization Trick),我们可以将上述分布转化为一个可以直接进行采样的代数式。只需采样一个标准高斯噪声 ϵ∼N(0,I),就能一步到位得到 xt:
xt=αˉtx0+1−αˉtϵ
逆向过程 Reverse Process
前向过程构建了一条从数据分布到纯噪声的单向通道。而生成图像的本质,则是在未知的概率空间中寻找一条原路返回的路径:从一个各向同性的标准高斯噪声 xT∼N(0,I) 开始,通过逐步去噪,最终还原出服从真实数据分布的干净图像 x0。
不可解的真实后验分布
理想情况下,我们当然希望能精确掌握逆向的条件转移概率 q(xt−1∣xt),这样就可以实现完美倒推。根据贝叶斯定理,这个逆向概率可以表示为:
q(xt−1∣xt)=q(xt)q(xt∣xt−1)q(xt−1)
但这在数学上是不现实的:公式的分母 q(xt) 是边缘概率分布,它要求我们对数据集中所有可能的初始图像 x0 进行积分(即遍历整个真实数据分布)。在高维图像空间中,这是一个典型的不可解问题。
前向过程是增量工程,但逆向过程想知道 q(xi) 的具体值,就好比眼前有一张半噪点图片,我们想知道它被生成的概率是多少,换言之,我们需要知道任意图生成这张图的总概率。我们哪里可能穷举全部图片呢?
高斯分布的渐进性质
虽然真实的逆向分布 q(xt−1∣xt) 无法直接计算,但基于马尔可夫链和随机微分方程的性质,数学上有一个极其重要的结论:当每一步的加噪步长 βt 足够小(即前向扩散过程足够平缓)时,逆向转移也可以用一个高斯分布来近似。
我告诉你我在吉大北门,你肯定没法推出前一天我在什么位置(复杂分布)。
但前一分钟、前一秒的位置是有迹可循的(高斯分布)。
这也反过来解释了,为什么在正向过程中我们只加一个微小的高斯噪声。
这一性质为我们提供了新的思路:既然已知真实的逆向路径是一个高斯分布,我们就可以用深度学习模型去拟合它的参数。
参数化近似
基于上述结论,我们引入一个可学习的神经网络(通常记作参数化模型 pθ),来近似这个未知的真实逆向过程:
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))
在这个公式中,神经网络 pθ 的核心任务是:给定当前的带噪图像 xt 以及当前所处的时间步 t,去预测前一时刻的分布参数——即均值向量 μθ 和协方差矩阵 Σθ。
符号拆解
-
θ:代表神经网络中所有可学习的权重参数。
-
输入:(xt,t)
- xt:当前时间步的带噪图像。
- t:当前所处的时间步(通常通过 Time Embedding 注入)。
-
输出一:均值 μθ(xt,t)
- 这是神经网络基于当前输入给出的最优猜测。
- 物理意义:网络认为在 t−1 时刻,图像最有可能长成什么样。这是指导去噪方向的绝对主力。
-
输出二:协方差 Σθ(xt,t)
- 这是神经网络对刚才猜测的不确定度估算。
- 物理意义:值越大,代表网络越没有把握。
公式解析
公式的工程本质非常清晰:
数学家提供了一个叫 pθ 的框架,然后对工程师说:“去造一个神经网络吧,只要你喂给它一张带噪图 xt 和时间 t,它能吐出一个均值 μθ,这个去噪模型就算造出来了。”
在这个前提下,图像扩散模型通常会选择 U-Net 来充当这个 pθ 的角色。
从预测均值到预测噪声
在上一节,我们把希望寄托在了神经网络 pθ 上,指望它能猜出逆向过程的均值 μθ。
但别忘了我们还有问题没解决:想训练网络,就必须要拿网络的预测值和真实均值计算 Loss。可是已经知道,真实的逆向分布 q(xt−1∣xt) 不可解,拿不到真实均值,怎么指导网络学习?
在这里,DDPM 提出了一个巧妙的解决办法:假设已知 x0。
直接求解 q(xt−1∣xt) 走不通,那如果我们额外知道原始图片 x0 呢?此时,前向过程诱导出来的条件后验分布是可推的:
q(xt−1∣xt,x0)=q(xt∣x0)q(xt∣xt−1)q(xt−1∣x0)
可以理解为:遍历所有 原图→t−1→t 的加噪路径,用贝叶斯归一,得到 xt−1的分布。
这个式子是 DDPM 可被训练的基石。它说明:首尾两端的 x0 和 xt 固定,中间 xt−1 的分布就退化成一个均值和方差都已知的高斯分布。
根据这个条件后验,我们可以用贝叶斯公式严格推导出它的真实均值 μ~t:
μ~t=1−αˉtαˉt−1βtx0+1−αˉtαt(1−αˉt−1)xt
有了真实均值,按理说就已经可以拿去算 Loss 了。但 DDPM 觉得还不够!
我们先前用重参数化实现了 x0→xt 的转换,反向推导,可以用 xt 和注入的噪声 ϵ 来表示 x0:
x0=αˉt1(xt−1−αˉtϵ)
将这个 x0 代入 μ~t,经过化简,我们得到了终极结论:
μ~t=αt1(xt−1−αˉtβtϵ)
这是 DDPM 的灵魂。 在这个真实的均值 μ~t 里,xt 是网络当前的输入,αt 和 βt 是预设常量。唯一未知的,就是前向过程中加入的那个随机噪声 ϵ。
既然如此,神经网络的任务就只有一件事:预测出在第 t 步时加入的那部分噪声 ϵ(记作 ϵθ)。
训练目标
按照严谨的数学推导,为了拉近预测分布和真实分布的距离(通常使用 KL 散度),我们会得到一个包含变分下界的复杂 Loss 形式,每一项前面都带有随时间步 t 变化的复杂权重系数。
但 DDPM 的作者发现,直接丢掉那些复杂的权重系数,不仅让公式看起来极其清爽,而且生成的图像质量反而更好。这是因为去掉权重后,模型被迫在那些更难去噪的时间步投入了更多的注意力。
最终,我们得到了一个极简的损失函数:
Lsimple=Et,x0,ϵ[∥ϵ−ϵθ(xt,t)∥2]
这里的 ϵ 是前向过程中真实添加的标准高斯噪声,而 ϵθ 是模型(通常是一个 U-Net)预测出的噪声。网络只要用均方误差(MSE)算出它们俩的距离,梯度下降就完事了。
从更宏大的数学视角来看,预测噪声的本质其实等价于预测数据分布的对数梯度,这一发现直接促成了扩散模型与 SGM 的理论大统一。相关内容我在下一篇详细拆解。
参考资料