RNN 04
GNN 基础1
生成模型基础4
Transformer 基础3
RNN 拥有记忆,但基础 RNN 的记忆传递机制实在过于脆弱。
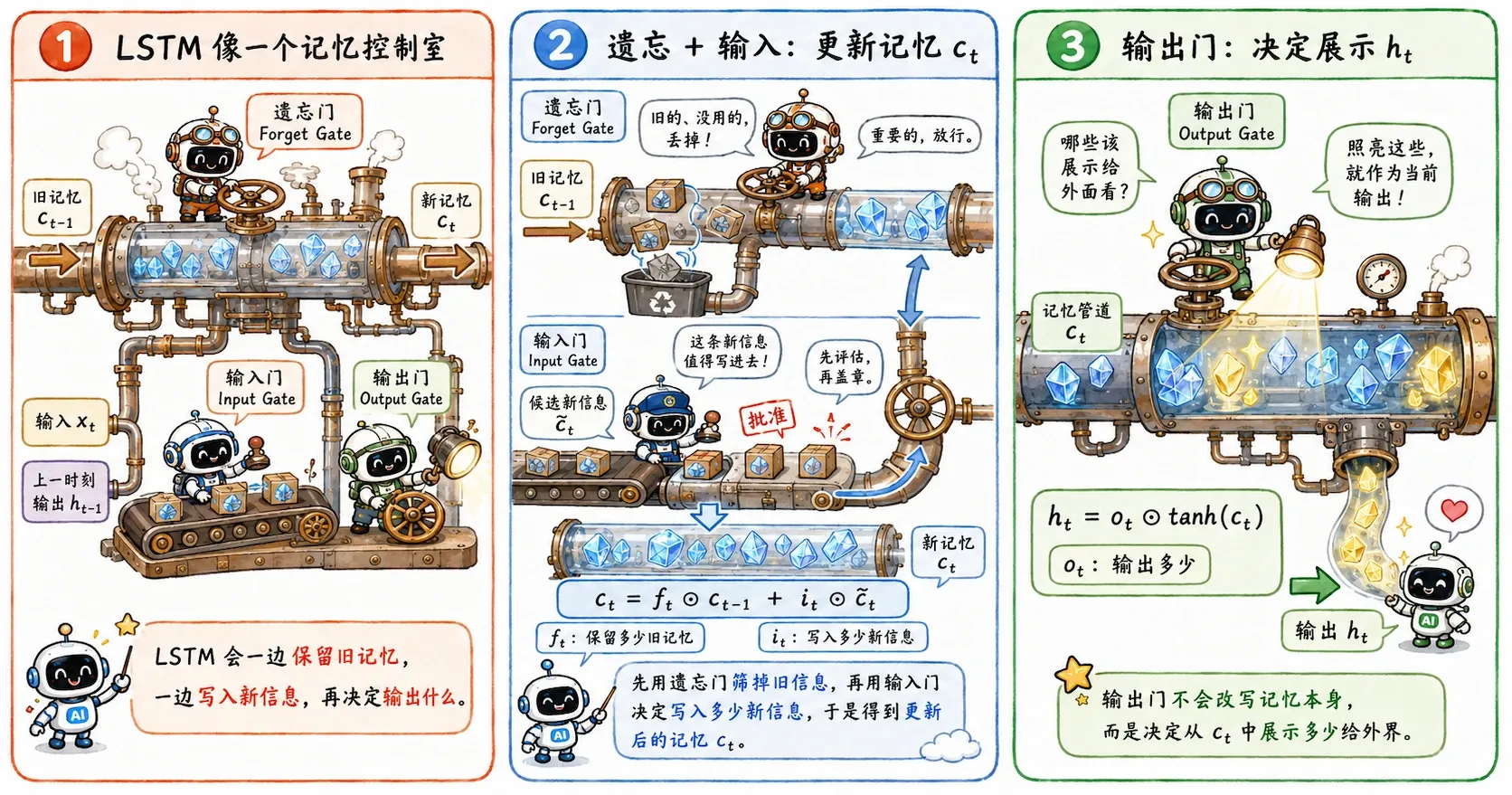
LSTM(长短期记忆网络)直接让模型自己学会选择性地遗忘、写入和读取。
两条状态
基础 RNN 通常只传递一个隐藏状态 。而 LSTM 选择了“双线并行”,同时维护两条状态流:
- (cell state,细胞状态):主内,偏向长期记忆的沉淀。
- (hidden state,隐藏状态):主外,偏向当前时刻的对外输出。
我们可以非常直观地这样理解: 是模型内部一本厚重的私密账本,而 则是模型在当下这一刻决定对外说出的话。
账本里的记录可以原封不动地保留很久,但每一步具体要对外透露多少账本里的信息,完全由模型自己斟酌(通过门控决定)。

三个门
LSTM 引入了三个核心门控机制。
由于门的输出通常都经过 Sigmoid,所以它们每个维度的数值都会被压缩在 到 之间。可以把它们想象成有灵魂的水管阀门:
- 接近 :阀门关紧,阻断信息。
- 接近 :阀门全开,让信息流过。
遗忘门 Forget Gate
遗忘门决定旧记忆 保留多少。
如果 某个维度接近 ,说明这部分旧记忆对当下依然很有价值,应该继续保留;如果接近 ,则说明这部分记忆已经过时,可以直接抹去。
有趣的是,虽然它叫遗忘门,但从数电的直觉来看,输出为 才保留的行为更像是记住。
输入门 Input Gate
输入门决定当前步的新信息有多少可以写入记忆。
与此同时,LSTM 会根据当前的输入和上一步的输出,草拟出一份候选新记忆:
可以看作滤网, 则是实际进滤网的内容,两者配合才决定了实际的新写入记忆量。
输出门 Output Gate
输出门决定当前内部记忆中,有多少内容需要暴露出去,成为当下的隐藏状态。
最终的对外输出是这样计算的:
好像人心一般,就算内心(cell state)再是波澜壮阔,当下表现出来的状态(hidden state)也只是冰山一角。
记忆更新
搞懂了三个门,我们来看 LSTM 最关键的一步—— cell state 的更新:
这条公式干了两件事:
- 留下该留的: 决定了旧记忆保留多少。
- 写下该写的: 决定了新记忆汇入多少。
最后,用一个简单的加法将它们合并。
千万不要直接忽略这个加法。
在基础 RNN 中,记忆每走一步都要被迫经历一轮完整的非线性矩阵运算(乘法);而在 LSTM 里,旧记忆被允许沿着 这条通道以加法的形式平稳(无损失)地向后流淌。
如果某段信息极其重要,模型只需让遗忘门 ,就可以让这份记忆在无数个时间步后依然清晰如初。同时,在梯度反向传播时,误差也可以沿着这条接近线性的通道顺畅地往回传,极大地缓解了长距离依赖中的梯度消失问题。
一个例子
让我们考虑这样一句跨度很长的话:
I grew up in France …叽里呱啦… I speak fluent French.
当模型读到 France 时,迅速意识到语言背景是一个非常关键的信息,需要写入长期记忆。
在这之后,中间可能隔了十几个毫不相干的修饰词。
如果是基础 RNN,“法国回忆”会在一次次的乘法中变得越来越淡,甚至消失。但 LSTM 可以通过门控轻松驾驭:
- 读到
France时,输入门打开,把语言信息写进 。 - 中间路过不痛不痒的修饰成分时,遗忘门保持接近 ,保护这份旧记忆不被破坏。
- 直到读到
speak时,输出门打开,让语言相关记忆影响当前预测。
代价:参数量
力量总是伴随着代价。LSTM 确实比基础 RNN 强得多,但参数量也是一个暴增。
基础 RNN 每一步只需要算一个简单的状态:
而 LSTM 在每一个时间步都必须要计算四组数据:
- 遗忘门
- 输入门
- 候选记忆
- 输出门
这意味着,在输入维度和隐藏维度相同的情况下,LSTM 的参数量大约是普通 RNN 的 4 倍。
从单一细胞到向量化层
前面的公式是我们在严肃钻研一个单独的 LSTM 细胞结构。实际工程代码里,为了压榨 GPU 算力,我们会按向量并行计算。
假设我们构建了一层拥有 128 个隐藏单元的 LSTM。那么:
- 和 都是 128 维的向量。
- 同样也都是 128 维的向量。
这 128 个维度里的每一个,都可以视作一个独立 LSTM cell 的状态。(可以看作是类似 CNN 的多通道,学习不同特征)
为了提高效率,主流框架通常会把计算这四组变量的权重矩阵拼在一起,搞一次巨大的矩阵乘法:
算完之后,再把这个长长的结果切成四段,分别去过 sigmoid 或 tanh 激活函数。
这就是向量化实现的意义——不改变任何底层的数学逻辑,只是把大批量的 cell 打包在一起同时处理,让并行计算的威力最大化。
Peephole
有些 LSTM 变体还会引入 peephole connection,窥视孔连接。
普通的门控在做决定时,视野只局限于外部输入和上一步的输出:
而 Peephole 给这些门额外多开了一个猫眼,让它们能直接看到细胞状态:
Stacked LSTM
单层的 LSTM 只能在时间轴(横向)上孤独地传递信息。为了提取更加抽象的高阶特征,我们通常会引入 Stacked LSTM(堆叠 LSTM)。
它在深度的方向上(纵向)叠加了多层网络。在同一个时间步 里,第一层 LSTM 的输出 会直接作为上一层(第二层) LSTM 的输入:
于是,整个架构交织成一张二维网:
- 横向(时间轴):从 到 ,传递记忆。
- 纵向(深度轴):从低层到高层,提取更抽象的序列特征。
GRU
如果觉得 LSTM 太过沉重,GRU(门控循环单元)是一个轻量化的替代方案。
LSTM 有三个门:输入门、遗忘门、输出门。
而 GRU 通常只保留两个门:更新门(Update Gate)和重置门(Reset Gate)。
巧妙的地方在于,它把“忘掉多少旧信息”和“写入多少新信息”绑定在了一起。
如果更新门决定保留大量的旧状态,那么新信息就只能少写一点;反之,如果决定清空旧状态,新信息就会大规模涌入。
由于少了一个门,GRU 的参数更少,训练速度更快,在大量现实任务中表现都可以说与 LSTM 旗鼓相当。因此在实际工程打磨中,究竟是用 LSTM 还是 GRU,是数据规模、任务复杂度、算力成本之间的 trade-off。