CNN 01
GNN 基础1
生成模型基础4
Transformer 基础3
当 DL 来到图像领域,CNN 登上舞台。
面对图片的大量特征,FNN 手足无措。
CNN 干脆把图像本身的性质写进网络结构里。
图像的性质
在学习 CNN 之前,先看图片本身。
为什么图像领域会与之前涉及的常规任务不同,至少有三个关键性质。
1. pattern 相对尺度小
图片里的大部分 pattern 都比整张图小得多。
识别一只猫,不需要每个神经元一上来就看完整张图。很多低级特征只发生在一个局部区域里,比如边缘、角点、纹理、颜色过渡。更进一步说,大部分高级特征(猫耳)在全局的尺度来看,也不过是沧海一粟。
如果用 FNN,每个像素都和下一层的每个神经元相连,模型会被迫为大量并不相关的位置关系准备参数。
这可以推出最直接的优化思路:局部区域应该先由局部参数处理。
2. pattern 可复用
一条竖直边缘出现在左上角,和出现在右下角,本质还是同一个特征。
在 FNN 里,它们没有任何关系。但怎么想都不应该为每个位置都训练一套独立的 detector(这个词其实不准确,囊括了 filter + 激活函数,我主要想说的是 filter,但打了这么多字也不舍得删了)。
更合理的做法是:同一组参数在整张图上反复扫描。
3. down sample 的可行性
把一张猫的照片等比例缩小并不影响特征识别,这说明图像里含有大量冗余信息。
没必要保留每一个像素级细节。尤其是在识别任务里,我们往往更关心“有没有这个特征”,而不是特征的具体位置。
所以 CNN 会提出 pooling 和 stride,它们都在做同一件事:压缩空间尺寸,让后面的网络用更少参数处理更抽象的特征。
CNN 架构
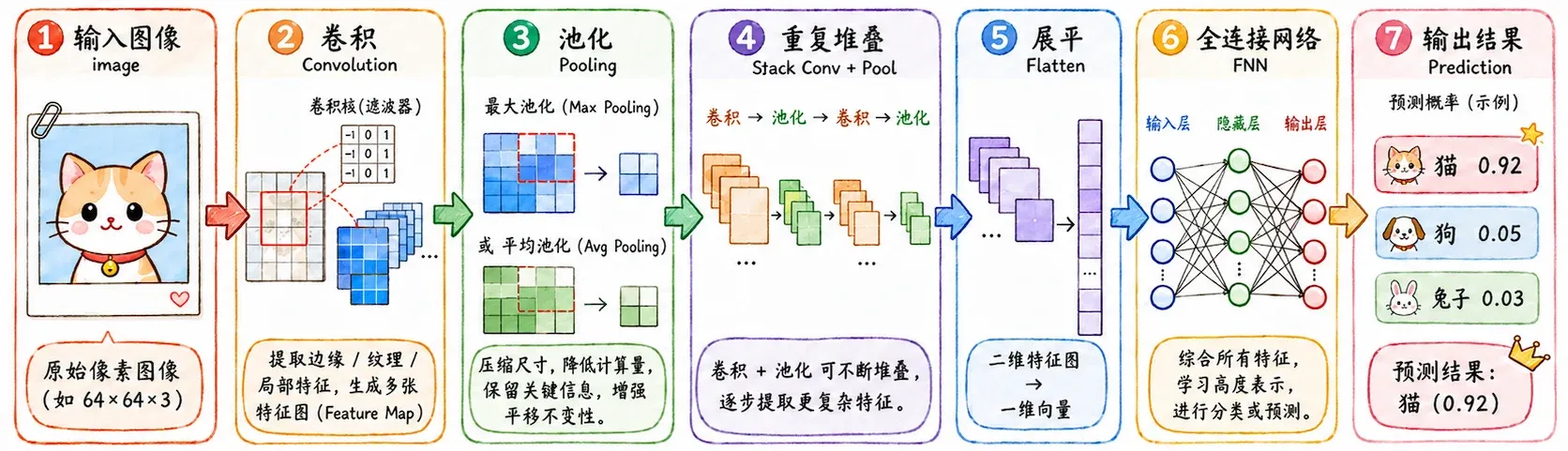
经典 CNN 的基本流程:
卷积 + 激活 + 池化 = 卷积层,这个过程会重复。
先提取空间特征,再根据这些特征做分类或回归。
convoluiton
卷积(convolution)在针对图像的前两个性质时有优异的表现:局部连接和参数共享。
卷积过程
在 CNN 里,一个卷积核不会一次性看完整张图,而是只看一个小窗口。它从图片左上角开始,按照固定步长从左到右、从上到下滑动。
在每个窗口都做一次简单运算:对应位置相乘,然后求和。
这其实就是内积:把局部图像区域看成向量 ,把卷积核看成向量 ,卷积输出就是 。
内积越大,说明这块区域越像这个卷积核的目标 pattern。
Kernel & Filter
这里有两个容易混的词:Kernel 和 Filter。
Kernel
Kernel 即卷积核,指一个二维权重矩阵。
在一次卷积操作里,一个 Kernel 只处理输入特征图中的一个通道。
Filter
Filter 即滤波器,指一个三维权重集合(张量)。
考虑输入是一张 RGB 图片。
一个 Filter 如果要完整处理这张图片,就需要包含 3 个 Kernel,分别处理 R、G、B 三个通道。
每个 Kernel 得到一个卷积结果,最后把这些结果沿通道方向加起来,再加上 bias,就得到输出特征图里的一个通道。
实例辨析(单卷积层)
举个例子,输入图片大小是 ,我们想提取一种边缘特征:
- 需要 1 个 Filter。
- 这个 Filter 内部有 3 个 Kernels,各处理一个颜色通道。
- 三个卷积结果逐像素相加,输出一个 的特征图。
如果希望网络提取 64 种不同特征,就需要 64 个 Filters。于是这一层的输出就有 64 个通道。
卷积层常见的权重张量维度就是:
比如 。
不过现在业界一般不对两个名次作严格区分,如果比较在意的话,就用卷积核同意替代好了。
stride & padding
卷积核的实际滑动也是大有讲究。
stride :每次滑动几格。步长越大,输出特征图越小。
padding :在输入边缘补 0。
如果不 padding,边缘像素被计算的次数会明显少于中心像素。随着网络层数加深,边缘信息会越来越快地丢失。
常见的两种模式是:
Valid Padding:不填充(默认模式),输出会缩小。Same Padding:等长填充(保留模式),四周补 0,让输出尺寸尽量和输入保持一致。
stride 和 pooling 会让感受野扩张得更快。代价也很直接:视野变大,但空间定位会更粗略。
感受野
感受野(Receptive Field) 即代表:某个神经元,最终能“看见”原图里的多大一块区域?
conv layer 1
一个 的卷积核,每次只看原图里的 小窗口,所以第一层输出里的一个值,感受野就是 。
conv layer 2
第二层卷积核看的是第一层特征图的 小窗口。第一层里的每个位置,本来又各自对应原图里的一个 区域。叠起来看,第二层的一个值就能间接看到原图里更大的一块区域。
整体效果
单层只做局部连接,但层数叠起来后,深层神经元会获得越来越大的视野。
这也是为什么浅层偏向边缘、纹理,深层会开始接近部件和语义。这正是因为深层卷积核拥有了综合更大范围信息的能力。
优势之处
在卷积的思路下,CNN 相比 FNN 的最大优势,就是参数少。
假设输入还是老朋友,一张 的图片。如果接一个有 1000 个神经元的全连接层,参数量大概是:
但如果用 64 个 的 Filter 作单层卷积层,参数量是:
差距显而易见。
pooling
池化(pooling)针对的是第三个性质:下采样后,物体通常仍然可识别。
Max Pooling
最大池化(Max Pooling)会在一个小窗口里取最大值。比如 的 max pooling,就是每 4 个值压缩成 1 个最大值。
直觉
如果某个局部区域里已经检测到了一个强特征(比如鲜明的边缘),我不必记住这个特征在区域内的精确位置,只需要知道这附近有它。
适合提取显著的、辨识度高的特征。
Average Pooling
平均池化(Average Pooling)则是在一个小窗口里取平均值。同样是 的窗口,它会将这 4 个值相加后除以 4。
直觉
它关心这个区域内的整体表现或背景信息,起到一种平滑信号的作用。
在现代网络中,常在最后一层使用全局平均池化 GAP,将整张特征图压缩成一个值,用来融合全局信息并防止过拟合。
包饺子
无论是哪种池化,都会带来两个核心结果:
- 特征图变小,后续的参数量和计算量大幅下降。
- 引入了局部平移不变性,使模型对小范围的位置偏移更不敏感。
当然,如果任务非常依赖精确的空间位置,比如语义分割、关键点检测,或者后面要讲到的围棋落子,那么粗暴的池化(尤其是最大池化)就可能损失关键的定位信息。
在这些场景下,网络设计往往会尽量减少池化层,或者采用其他方式(如空洞卷积)来维持分辨率。
flatten & FNN
经过多层卷积和池化后,我们得到的是一组抽象特征图。
浅层可能是边缘和纹理;中层可能是局部结构;深层可能已经接近眼睛、轮廓、部件这类语义特征。
最后把这些特征图 flatten 成一维向量,交给 FNN 或其他分类头输出结果。
这里的 FNN 不再负责从原始像素里硬学空间关系。它拿到的是 CNN 已经整理过的特征。