RNN 01
GNN 基础1
生成模型基础4
Transformer 基础3
文本、语音、时间序列这类任务都有一个共同点:当前信息的意义不是单一决定的,往往需要联系上下文。
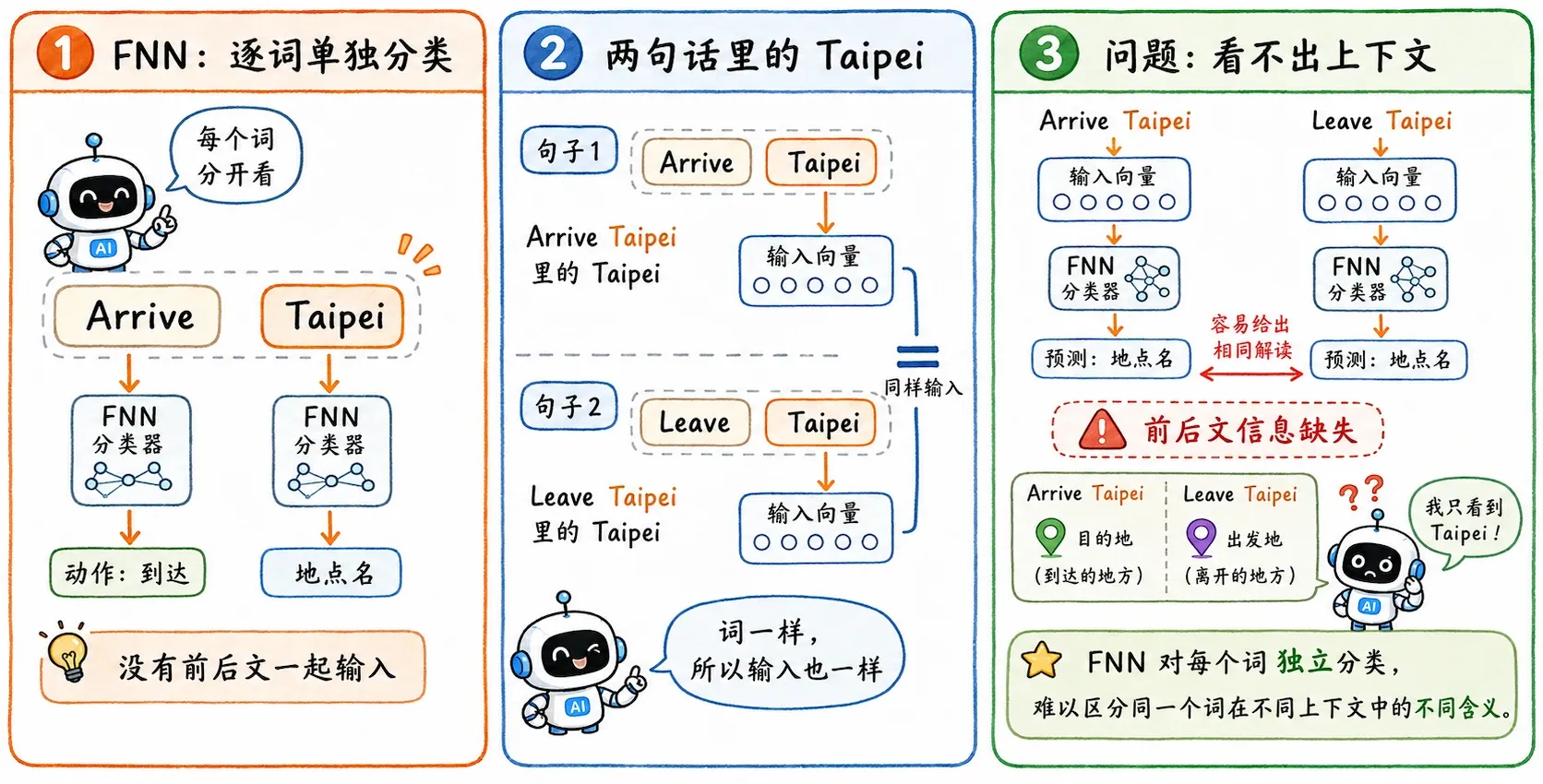
比如在订票系统里,单独看
Taipei,它只是一个地名。但如果前面是Arrive,它大概率是目的地;如果前面是Leave,它又是出发地。这种依赖上下文的任务,FNN 力不从心,它一次性读取处理所有词,相当于把双层牛肉堡一巴掌拍扁,只能吃到风味,但想分辨层次的口感就难如登天了,当然,也有逐词孤立分类的 FNN,我在后文中会提到。
槽位填充
NLP 的经典任务:槽位填充(Slot Filling)。
它是一种信息提取任务。给模型一句自然语言,让模型把关键信息摘出来,放进预设好的槽位里。
比如输入:
Arrive Taipei on November 2nd
希望输出:
Destination:TaipeiTime of Arrival:November 2nd- 其他词:不是目标槽位
文本怎么变成数字
模型没有读字符串的能力,无论是 FNN 还是 RNN,第一步都要把词变成向量。
One-hot
最直接,最不绕弯子的方法是建立词表。
假设词表是:
那么 Taipei 就可以表示成向量形式:
这就是 one-hot,最直接,但也是最笨的方法:
- 维度巨大。如果词表有 50000 个词,每个词就是 50000 维。
- 向量极度稀疏。绝大多数位置都是 。
- 词和词之间没有语义距离。
Taipei和HongKong的距离,跟Taipei和apple的距离没有本质区别。
(当然,考虑到不可能真的覆盖全部词汇,词表里有一个 others 项处理未登记词)
Word Hashing
还有一种思路是 Word Hashing。
流程(以单词 good 举例):
- 前后加分隔符:
#good# - 切字母三元组 (trigram):
#go, goo, ood, od# - 给所有字母三元组做哈希映射到固定维度向量,做 0/1 稀疏表示
- 单词 = 所有三元组向量相加,得到低维稀疏特征向量
为啥要加井号呢,一个是为了防止词边界模糊,模型理解不到位;另一个是考虑到 #a# 和 #to 这些特殊情况。
这样做后的优势显而易见:
- 压缩维度。不需要为每个完整词都准备一个巨大词表项。
- 能处理一部分词表外词(OOV)。即使模型没见过某个完整单词,只要它的字符片段比较常见,模型仍然能拼出一个近似表示。
代价是 hash collision。
不同单词可能 trigram 相同,哪怕 trigram 不同也有可能映射到同一个 bucket。
所以可以把这个方案看作一种工程折中:用可接受的信息碰撞,换更小的表示空间和更强的 OOV 处理能力。
Embedding Lookup
Word Hashing 有效解决了维度爆炸和稀疏性的问题,但没有解决根本问题:模型无法自动理解词与词之间的语义关系。为了让 Taipei 和 HongKong 的距离自然地比 Taipei 和 apple 更近,现代深度学习引入了词嵌入查表(Embedding Lookup)。
它的核心思想很简单:不再直接输入稀疏的 0/1 向量,而是给每个词分配一个连续的、低维的、可学习的稠密向量(Dense Vector)。
怎么查?
假设我们的词表大小依然是 ,我们想把每个词表示成一个 维的向量。
我们会偷偷在模型里初始化一个巨大的权重矩阵(Embedding Matrix) :
当程序读到 Taipei(索引为 2)时,直接去矩阵 的第 2 行把那三个数拿出来:
这个“直接拿”的操作,在代码里就叫 Lookup。
查表的数学本质
这里还有一个非常优雅的数学巧合:Embedding Lookup 在数学上等价于 One-hot 向量乘以权重矩阵。
可以算一下 Taipei 的 One-hot 向量乘以 :
因为 One-hot 向量里只有索引为 2 的地方是 ,矩阵相乘时,其他行的权重全被 抹去,最后就是滤出了第 2 行。
那为什么不直接做矩阵乘法,而要搞一个 Lookup 呢?
答案是工程性能。如果词表有 50000 个词,矩阵乘法会产生大量的 无效计算;而 Lookup 是一次 的内存索引操作,效率高得飞起。在 PyTorch 里,nn.Embedding 本质上就是一个不带偏置项(bias)的线性层 nn.Linear,只不过前向传播被优化成了查表。
优势之处
-
维度压缩
一开始会误解——既然还是一个词对应一个向量,压在哪了?
其实压缩的是单个向量的长度。One-hot 是“一个萝卜一个坑”的局部表示,词表有 50000 个词,每个词的向量就得是 50000 维(其中 49999 个是无用的 )。
而 Embedding 采用的是分布式表示,它用表把长度限制到了 256 或 512 维。到这一步你就明白了,这几百个维度,在神经网络里又可以看作是在刻画潜在特征。
它用几百个填满信息的连续浮点数(稠密向量 Dense Vector),完美取代了几万个空洞的 (稀疏向量 Sparse Vector)。
-
权重的“前置”
One-hot 只是一个死板、没有语义的身份 ID。
而 Embedding Lookup 相当于把网络第一层的权重矩阵直接搬到了输入入口,当成一本字典,即这个字典是活的(可调整的网络参数)。在模型训练时,误差会通过 BP 传回来。如果模型发现
Taipei和HongKong总是出现在类似的上下文中,梯度就会在不断迭代中,把这两个词在矩阵中对应的行向量,推向高维空间里更近的位置。它真正学到了词与词之间的“语义距离”。
当然也有缺点,它和 One-hot 一样,一旦遇到 OOV(Out of Vocabulary)词汇,还是只能扔给 Other(或者叫 [UNK])项。所以现在大模型更倾向于把 Word hashing 的切片段思想升级为 BPE/WordPiece 等子词(Subword)分词器,然后再去喂给 Embedding Lookup,把两者的优势结合起来。
Word2Vec 怎么训练出 embedding
上面只说 Embedding Matrix 可以训练,但没有解释为什么机器能通过它学到语义。
一个经典方法是 Word2Vec。Jay Alammar 的 The Illustrated Word2vec 对这个过程有很清楚的可视化解释。
大致思路是:一个词的意义来自它经常和哪些词一起出现。模型用滑动窗口从文本里制造训练样本,再通过 Skip-gram 和 Negative Sampling,让真正相邻的词向量更接近,让随机采样的无关词更远。
FNN 的问题
有了词向量之后,我们就可以把每个词丢进 FNN 了。
输入当前词向量,输出当前词属于各个槽位的概率。
问题是 FNN 只能孤立地处理每个词。
它看到 Taipei 时,不知道前面是 Arrive 还是 Leave。如果输入向量完全一样,FNN 的输出也会完全一样。
这就是 FNN 在序列任务上的根本缺陷。
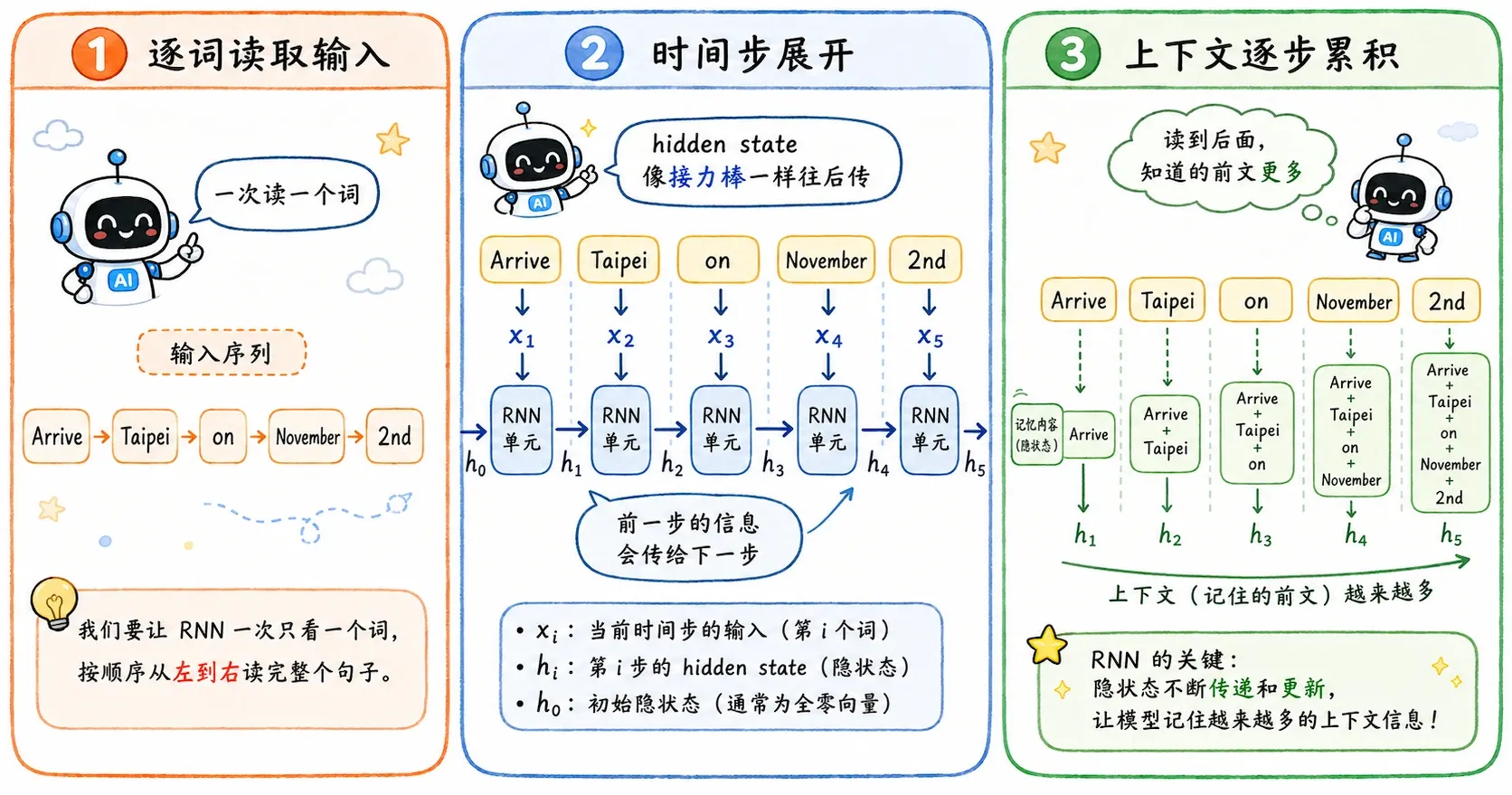
RNN 的记忆
RNN 在普通神经网络里加入了一个循环状态。
它不仅看当前输入 ,还看上一个时间步留下来的隐藏状态 。
最基本的公式可以写成:
其中:
- 是当前词向量。
- 是上一时刻的记忆。
- 是当前时刻更新后的记忆。
- 负责处理当前输入。
- 负责处理历史状态。
take it easy,其实就是在说:
当前理解 = 当前词 + 之前留下的上下文。
处理 Arrive Taipei on November 2nd 时,RNN 会一步一步读:
- 读到
Arrive,生成状态 。 - 读到
Taipei,同时看Taipei的词向量和 。 - 因为 里已经带着
Arrive的信息,所以模型更容易判断Taipei是目的地。
改变词序,隐藏状态的传递路径也会改变,最终输出自然也会改变。
Elman 和 Jordan
早期 RNN 有两个常见变体:Elman Network 和 Jordan Network。
Elman Network
Elman Network 把隐藏层状态存入 memory,即下一步读取的是上一步的 hidden state。这也是现在讲基础 RNN 时最常见的形式:
它记录的是模型内部对前文的抽象理解。
Jordan Network
Jordan Network 存的是上一时刻的输出,也就是当前输入不仅参考当前词,还参考上一步已经预测出来的结果。
这在某些任务里很合理。比如槽位填充中,如果上一个词已经被判断为某种槽位,当前词的判断可能会受到它影响。
但输出层是更靠近任务目标的东西,不可避免的,错误也可能被一路传下去。
双向 RNN
单向 RNN 只知道过去,不知道未来。
但我们实际在读句子时,经常要看完整句子才能判断某个词的作用。
比如判断一个词是不是地名、时间、修饰语,后面的词也可能提供关键线索。
双向 RNN(Bidirectional RNN)同时训练两个方向:
- 一个从左往右读,得到前文记忆。
- 一个从右往左读,得到后文记忆。
最后把两个方向的隐藏状态合起来,再做当前时间步的预测。
这样判断第 个词时,模型其实已经看过了完整句子。
代价很明显:无法实现实时生成。
因为如果要从右往左读,就必须先知道未来的词。这对于一边输入一边输出的生成任务,是不现实的。